| <問い合わせ先> |
| 総合政策局技術安全課 |
|
(内線25615)
|
| 電話:03-5253-8111(代表) |
平成15年度は、当課の研究課題のうち、平成16年度に予算要求を予定している1課題についての事前評価及び平成14年度に終了した1課題についての事後評価を実施した。
【平成16年度実施予定課題(事前評価)】
●陸・海・空の事故防止技術の開発
- 概要
陸・海・空の各種交通機関が高速化、大型化、高度化されるに伴い、安全性向上についても長年に亘り新しい安全設備の導入、構造の改善等による各種の対策が講じられ、相当な安全性の向上が図られてきた。しかしながら、近年はこの様なハード面を中心とする改善のみでは、事故発生件数や事故による死者数が大幅に削減出来ない状況にある。
近年の事故の状況を分析すると各種交通機関における事故のうち、およそ8割はヒューマンエラーに起因するものであることが判明している。この結果から、事故防止にとって、交通機関のハード的な性能向上だけでは有効な対策にはならないことが認識されてきており、人間特性を考慮した高度な支援システムによりヒューマンエラー削減を図るアプローチが重要であると考えられている。
そこで、陸・海・空の各種交通機関に適用、応用可能なヒューマンエラー防止技術の開発やヒューマンエラー防止指針の策定を通して、事故発生件数の大幅な削減、交通機関の安全性向上及び安心・安全な社会の実現を目的とする。
- 研究期間(予定)
平成16年度〜19年度
- 実施体制(予定)
(総括責任課)
国土交通省総合政策局技術安全課
(研究実施機関)
独立行政法人 海上技術安全研究所
独立行政法人 電子航法研究所
独立行政法人 交通安全環境研究所
(大学)
筑波大学、山梨大学、東京海洋大学、航海訓練所 等
(メーカー等)
三菱スペース・ソフトウェア、メディカルパレット、ジップス 等
(その他の協力体制)
工学分野以外に心理学や人間工学の専門家の参画を得て協力に推進する予定。さらに、医療技術を要する評価実験を実施するため、医者や心理士等の必要な人材は外部に求めることとする。
- 研究目標
- 運転者・操船者等の作業量等の定量的評価手法の開発
- 運転者・操船者等の状況把握手法の開発
- 運転者・操船者等に対する支援機能の開発
- 上記機能を活用した総合的利用実験、評価
- 交通機関におけるヒューマンエラー防止指針作成、具体策の提案
- 研究計画
- 作業量等の定量的評価手法の開発(平成16年度〜19年度)
- 状況把握手法の開発(平成16年度〜19年度)
- 支援機能の開発(平成17年度〜19年度)
- 総合的利用実験、評価(平成18年度〜19年度)
- ヒューマンエラー防止指針作成、具体策の提案(平成19年度)
- 研究成果(予定)
- 運転作業シミュレータによる評価手法の開発
- リアルタイムでの脳の活性度評価システムの開発
- 標準手順からの逸脱検知によるアドバイス機能の開発
- 高齢者ドライバ支援システムの開発
- 総合的利用実験による、機能・支援システムの検証
- ヒューマンエラー防止指針の作成
- 活用方策と課題
陸海空の各種交通機関において、ヒューマンエラーの抑止、検出、リカバリーを行う高度な機能、支援システムを組み込むことにより、ヒューマンエラーに起因する事故発生数を大幅に減少させ、安心安全な交通機関が実現させる。課題としては実用化におけるコスト面の制約をいかにクリアするかである。
- 評価結果
近年、ヒューマンエラーによる事故が目立つようになってきており、高齢社会での対応としてのニーズは大きく、他分野のシステムへの展開可能性も高い。極めて困難な課題と考えられるが、適切な研究計画の策定により達成可能な内容である。研究計画については、技術的な観点からは適切なものと考えられる一方、予算等については必ずしも十分なものとは思われないが、効率的な使用により対応は可能と考えられる。
本研究は、工学分野以外に医学、心理学等の他分野の専門家の参画が必要であり、外部の研究者の活用、共同研究の一層の推進が重要である。予兆をリアルタイムにキャッチし事前対応するというタイプのシステムは未だ殆ど無く、国際的な注目度は高いと予想される。ヒューマンエラー防止については極めて困難な課題と考えられるが、最終的に具体的な提言がなされるならば、社会に対する貢献度は大きい。ただし、技術的に可能となるだけでなく、
社会が受け入れるシステムであることが実用上、普及には必要不可欠である。
<平成15年8月5日、平成15年度研究開発課題評価「陸・海・空の事故防止技術の開発」事前評価委員会>
【平成14年度終了課題(事後評価)】
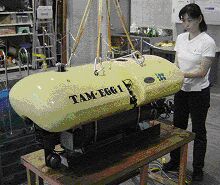
●深海モニター用小型ロボットシステムの技術開発
- 概要
ナホトカ号事故の際の海底調査において、比較的大型のROV(遠隔操縦型潜水艇)システムによって行われたが、船体の周辺にはROVのケーブルが絡まるおそれのある障害物が多数存在したため、詳細な調査が極めて困難であった。そのため、沈没等の海難事故などに迅速に対応するためには小型で機動性に富む無人潜水調査システムが必要であることが判明した。本研究では、AUV(自律型潜水艇)とROVの特長を備え、かつ小型で機動性に富む深海モニター用小型ロボットシステムの実現に必要な要素技術の開発を目標としており、さらに本研究の成果は学術調査にも利用可能であるとともに、民間における新たな需要も喚起するものと考えられる。
- 研究期間
平成11年度〜14年度(4ヵ年)
- 実施体制
(総括責任課)
国土交通省総合政策局技術安全課
(研究実施機関)
独立行政法人 海上技術安全研究所
(大学)
東京大学
(メーカー)
KDDI
- 研究目標
- ビークル遠隔操縦のための高速画像通信装置の開発
- 目標点到達のための中継機形状の最適設計
- 音響通信下における自律機能と遠隔操縦手法の開発
- 全体システムの軽量・小型化を実現するためのシステムの統合化
- 研究経過
- 小型ロボットシステムの水中運動計測手法の研究(平成11年〜14年度)
- 小型ロボットシステムの流力的運動特性に関する研究(平成11年〜14年度)
- 画像通信装置の開発(平成12年〜14年度)
- 自律機能および遠隔操縦技術の開発(平成12年〜14年度)
- プロトタイプの設計・製作および総合試験(平成12年〜14年度)
- 研究成果
- 遠隔操縦に必要な世界最高速(128kbps)の高速画像通信装置を開発した。
- 音響通信による画像情報に基づく遠隔操縦機能および自律機能を開発した。
- 中継機の降下運動特性を理論的・実験的に解明し、中継機の流体力学的設計手法を開発した。
- 全体システムを軽量小型化するための詳細設計をおこなった。
- 活用方策と課題
ビークルのプロトタイプ、音響通信装置、遠隔操縦技術をシステムとして組み上げその基本的機能を確認したこと及び中継機の降下模型を用いて中継機の形状改良を実施したことにより、今後本システム実機の開発が可能となった。
- 評価結果
今回の研究テーマは、わが国周辺海域における海難事故や事件の多発、事故調査と対応策の素早い立案が求められること等を考えると、非常に適切な研究テーマの設定である。その意味で、ユニークなシステムの提案である点は高く評価されるものの、運用するシナリオの検討については、必ずしも十分でないとの印象を受けた。研究開発の実施方法については、新規施設(深海域再現水槽)を有効に利用して研究を進めたと考えられ、限られた資金の中で新規要素技術を開発し、ビークル試作機まで製作できたことは評価され、本研究開発の実施手段・手法は適切であったと考えられる。
一方、特許登録件数が少ないと思える。研究開発では、特許取得は非常に重要な要素であり、常に視野に入れた研究開発体制が望まれる。有索のROVでの沈船調査では、調査に限界があることは明らかである。今回開発した新しい調査ロボットを使用することによって、より詳細な沈没状況を把握でき、原因の究明、防油対策及び引揚工法の検討などに重要なデータを提供できる事になる。従って、要素技術の開発で終わることなく、環境条件である3000m水深の実用化の検証を実海域で行い、わが国独自の深海ロボットシステムの確立を望む。
<平成15年8月5日:平成15年度研究開発課題評価「深海モニター用小型ロボットシステムの技術開発」事後評価委員会>

 All Rights Reserved, Copyright (C) 2003, Ministry of Land, Infrastructure and Transport
All Rights Reserved, Copyright (C) 2003, Ministry of Land, Infrastructure and Transport