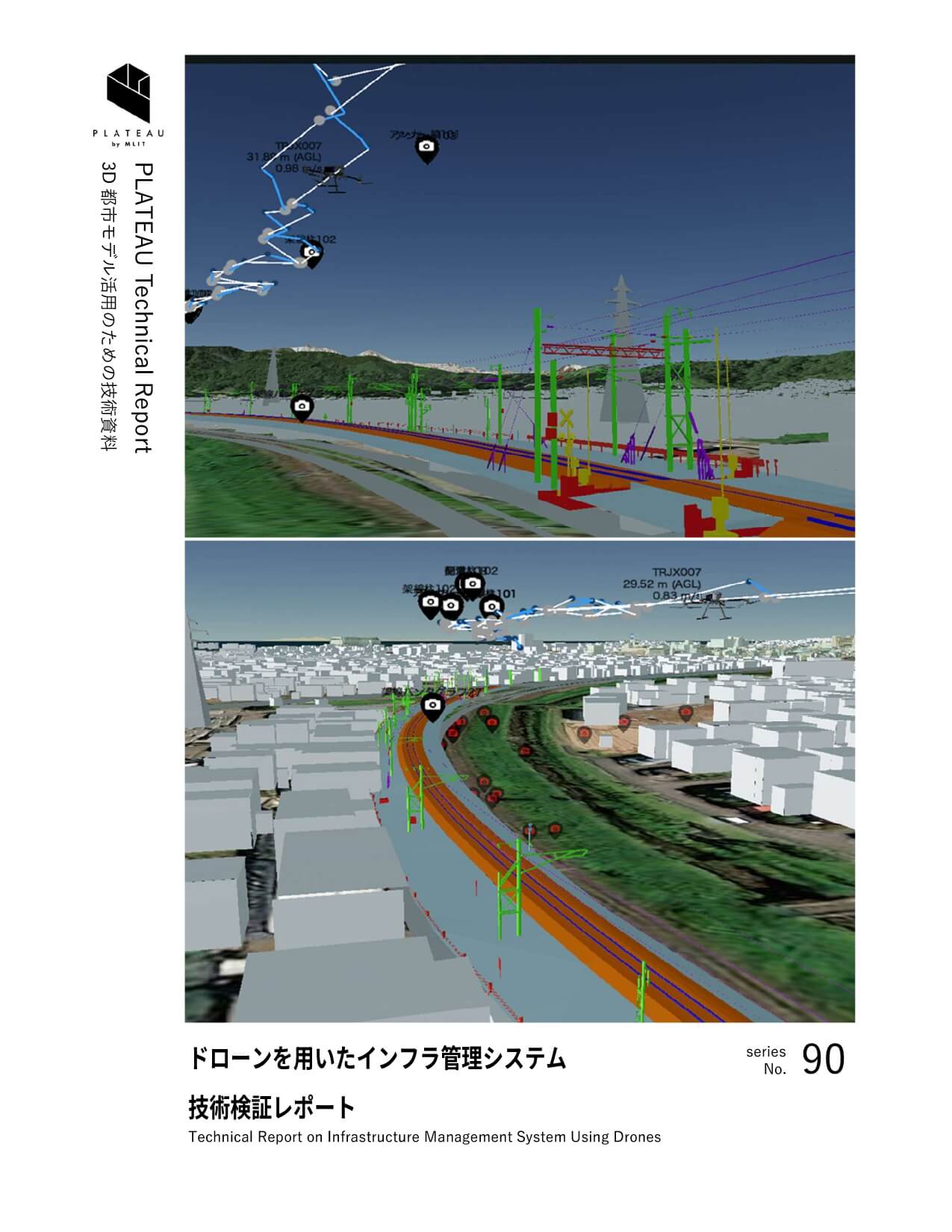
ドローンを用いたインフラ管理システム
| 実施事業者 | 株式会社トラジェクトリー |
|---|---|
| 実施協力 | えちごトキめき鉄道株式会社 |
| 実施期間 | 2023年10月〜12月 |

3D都市モデルを活用することで、ドローンによる鉄道施設の保守・点検システムを構築。ドローン活用によるインフラ施設の保守・点検業務の省力化を実現する。
実証実験の概要
鉄道の保守・点検業務は、各鉄道事業者が定める規定に則り、様々な観点で安全性の担保が必要なことから、多くの労力と時間が割かれている。一方で、少子高齢化による就業者の減少、高スキル者の高齢化等が進む中、老朽化しつつあるインフラ施設の保守・点検業務の省力化が急務である。
今回の実証実験では、3D都市モデルを用いた鉄道施設の管理台帳を構築するとともに、ドローンが取得した画像を台帳に紐づけて管理する仕組みを開発することで、目視点検による保守業務の一部を代替するインフラ管理システムを構築する。また、鉄道敷地内でのドローン撮影によるリスクを最小化するため、3D都市モデルから算出した空間リスク値と鉄道車両の近接による動的リスク値を組み合わせたルート管理システムを開発する。これらのシステムを統合することによってインフラ管理業務の作業省力化、効率化の実現を目指す。

実現したい価値・目指す世界
インフラ施設の保守・点検業務におけるドローン活用は山間部を中心に進んでいるが、市街地での導入実績は極めて少ない。市街地ではインフラ施設の私有地にドローンが侵入しないように精密な飛行が求められるため、高スキルの操縦者が必要となり、法令遵守や安全性の担保の観点からもドローン導入の障壁となっている。一方で、老朽化しつつあるインフラ施設の保守・点検業務の省力化は喫緊の課題であり、市街地におけるインフラ点検ドローンの実装が求められている。
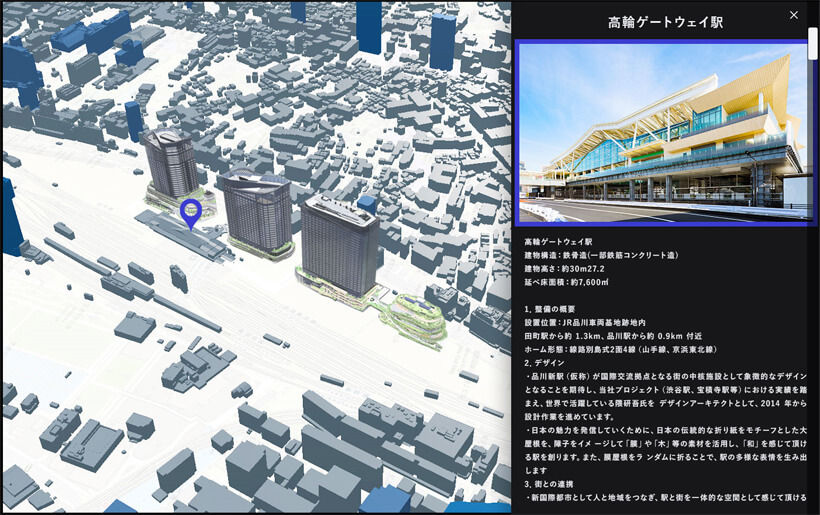
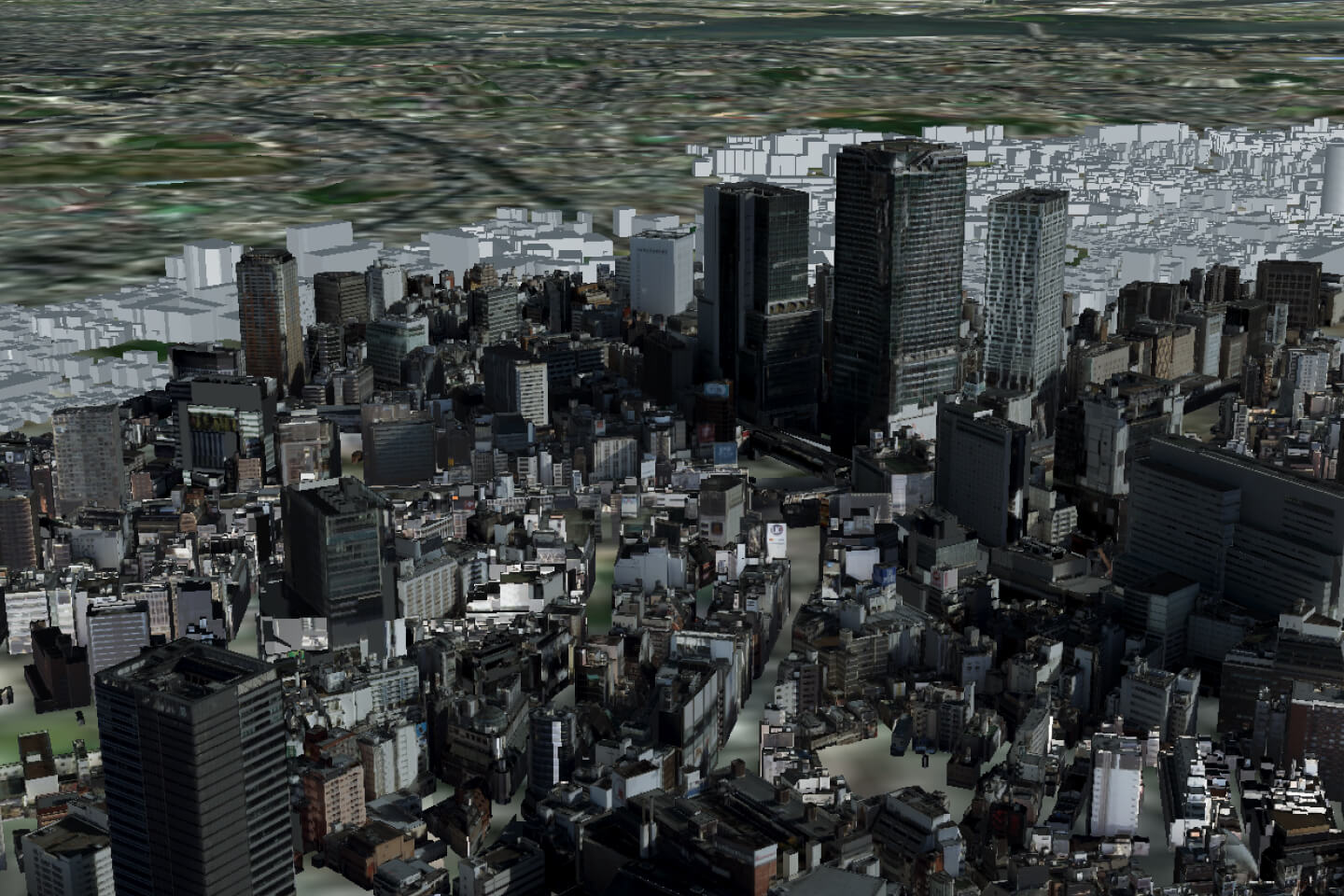
3D都市モデルは鉄道等のインフラ施設の複雑な形状や、施設類型や構造などの属性情報を正確に保持することができる。今回の実証実験では、これらの3D都市モデル(鉄道モデル、都市設備モデル等)を活用し、鉄道等の点検ルートを飛行してドローンが撮影した写真や動画等を3D都市モデルに紐づけて管理することで施設点検を行うことができるインフラ保守・点検アプリケーションを開発する。本システムでは、3D都市モデルの情報を基にインフラ管理に必要なルートを自動的に設定する機能のほか、施設情報や点検実績の管理・共有等が可能なデータベースシステムを構築する。施設情報をデータベース管理することで、施設単位で写真を比較し、経年劣化や破損状況を確認することが可能となる。
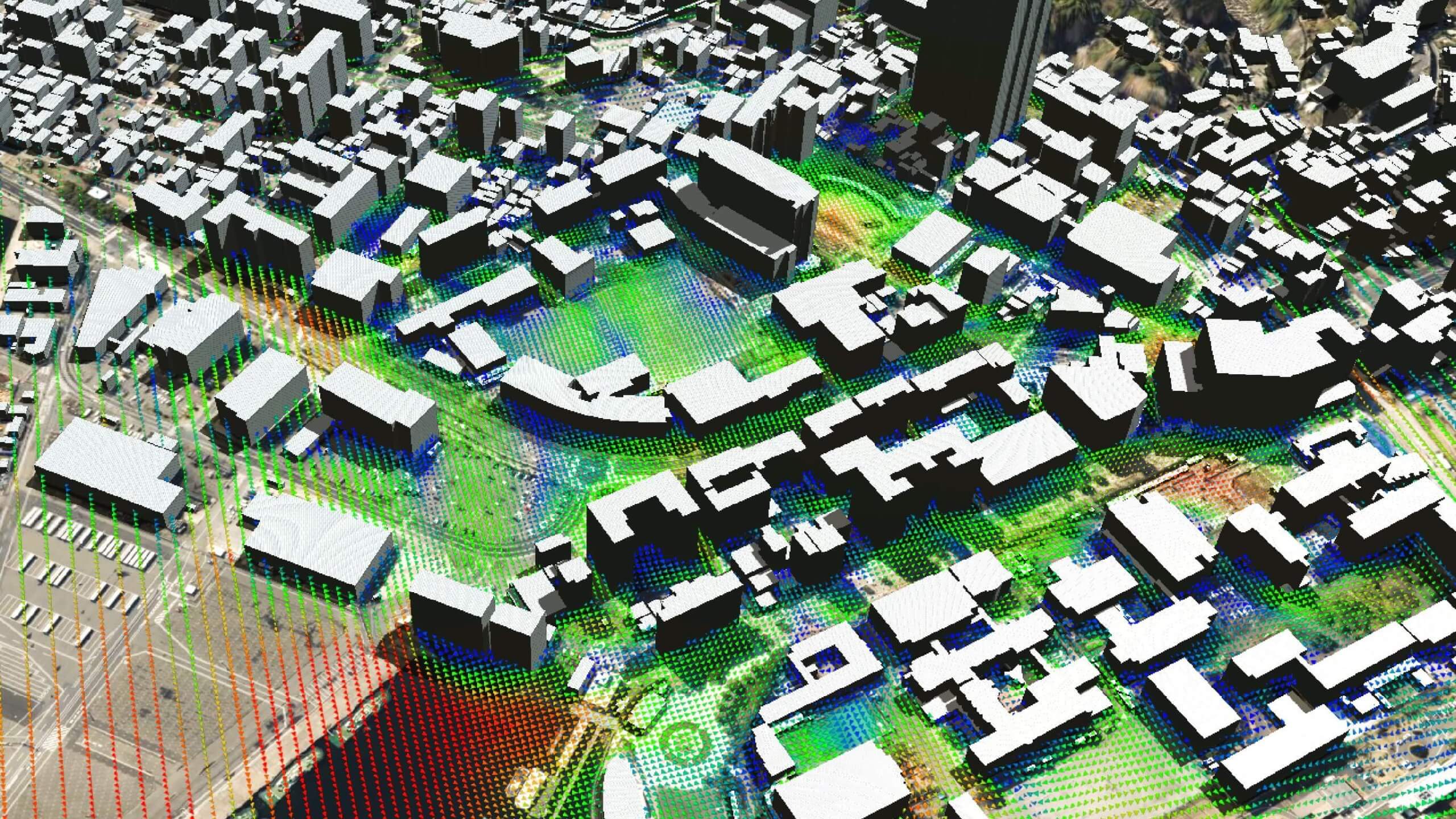
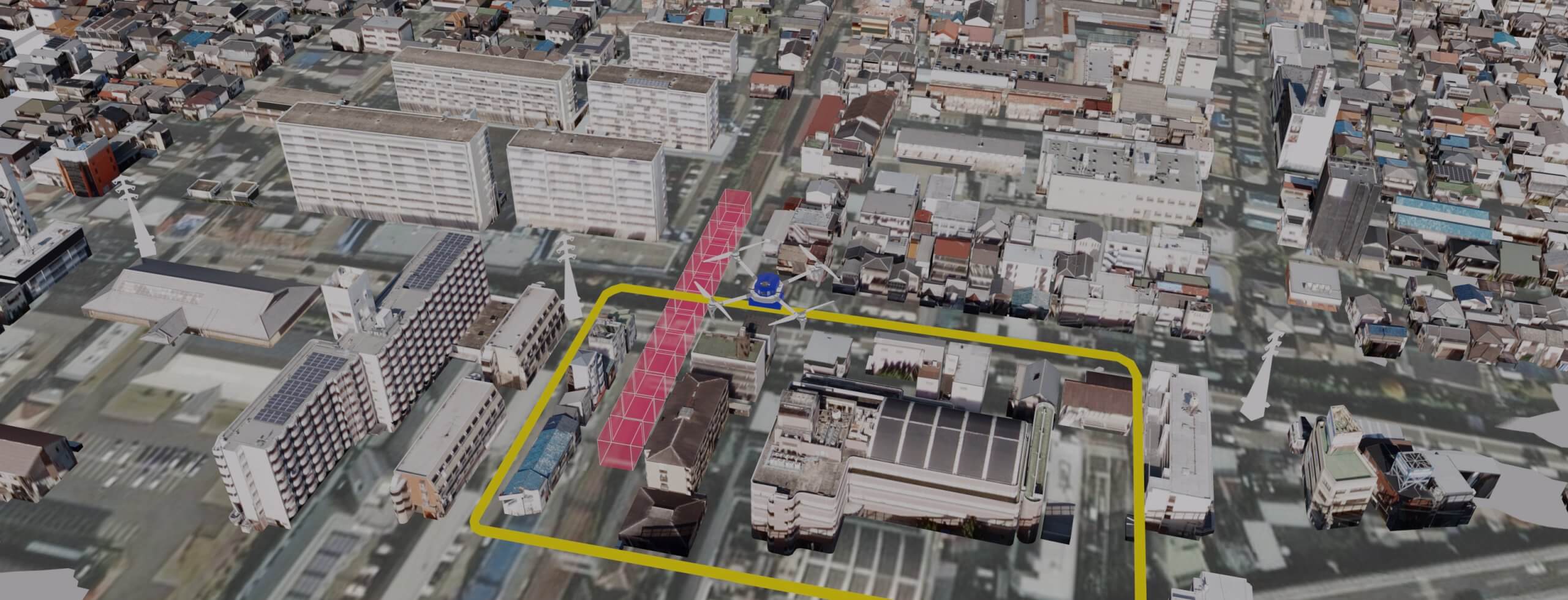
また、ドローンがインフラ点検ルートを安全に飛行するためには、静的なグラウンドリスクとともに、鉄道車両の接近等の動的リスクを評価し、リアルタイムにルートを最適化することが必要となる(鉄道が接近している場合は鉄道敷地や近隣空き地に一時的に退避するなど)。このため、3D都市モデルのもつ地上の利用情報と、鉄道車両の動き等の動的情報を統合したリスク評価システムを開発することで、操縦者のスキルに依存せず安全なルートを自動生成する仕組みを構築する。
これらのシステムを統合することにより、人や車両が入りづらい場所や高所における安全な点検などをドローン操縦者のスキルに依らず実施することや、現場作業の身体的負荷の軽減、危険が伴う高所作業の削減、作業計画策定の効率化などのデータに基づいた効率的かつ正確なインフラ管理、災害発生時等における迅速な情報把握等の実現を目指す。

検証や実証に用いた方法・データ・技術・機材
今回の実証実験では、鉄道事業者向けのドローンによるインフラ管理支援システムとして「インフラ管理システム」と「ルート管理システム」を開発した。
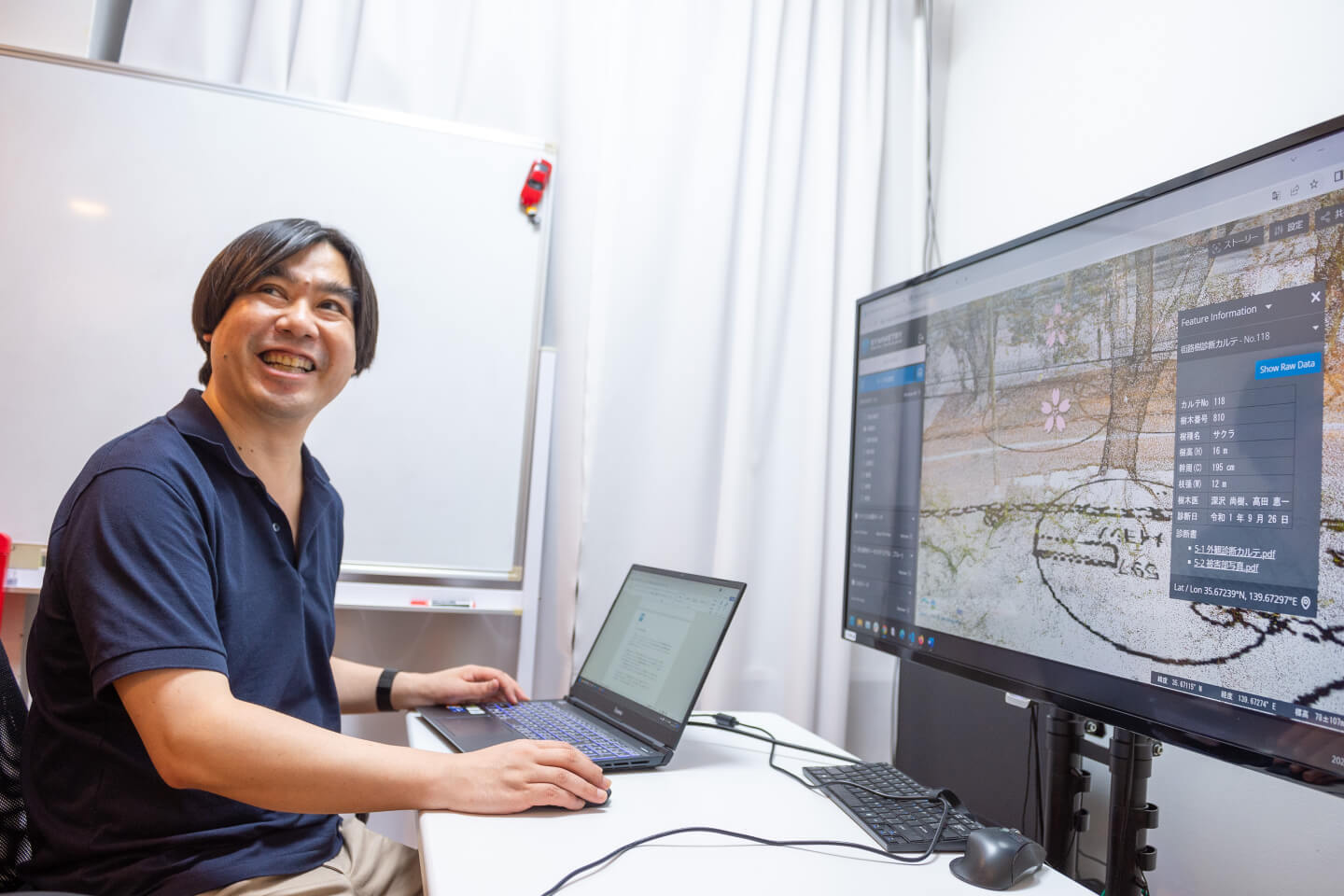
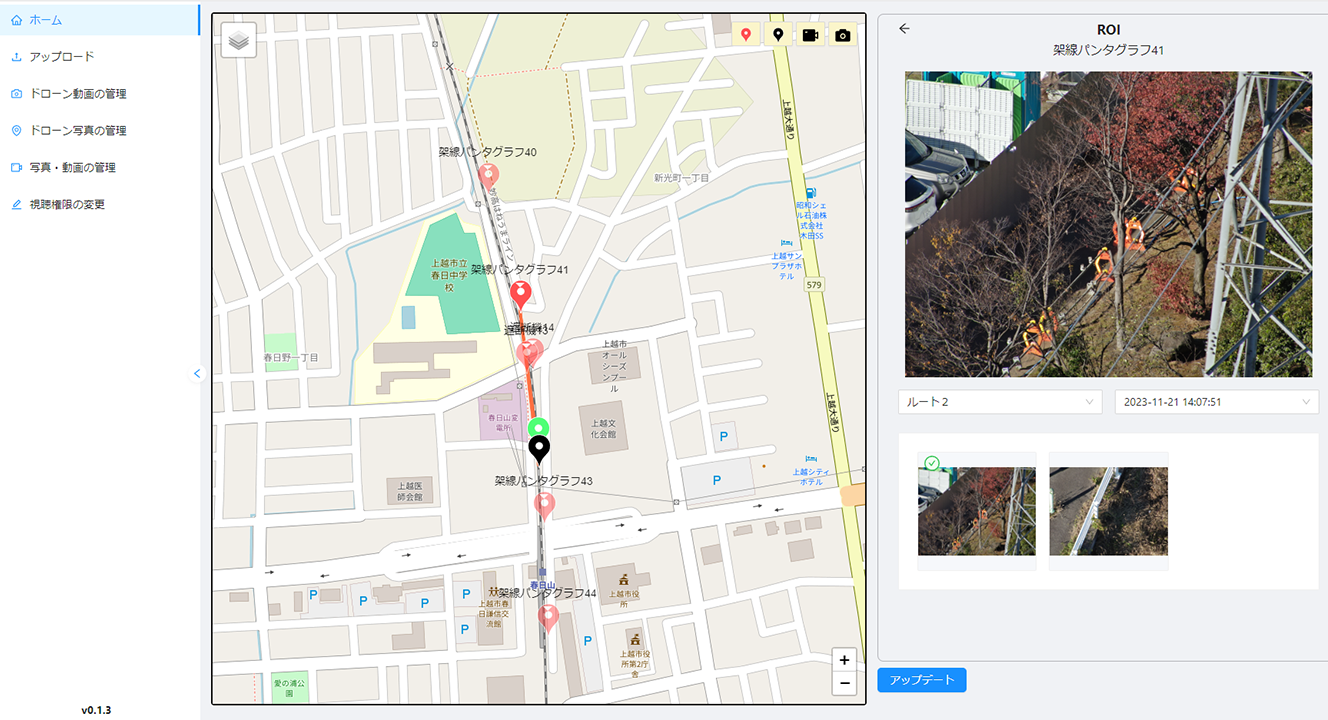
「インフラ管理システム」は、3D都市モデルの交通(鉄道)モデルLOD3及び都市設備モデルLOD3として整備したレール、架線柱、架線、踏切施設等の鉄道事業者の点検対象となる地物に写真や動画をひも付け、管理・閲覧を行うシステムである。本システムは、点検業務における利便性を考慮したUI/UX、地図上で撮影位置を表示する機能、対象地物や撮影位置で取得した写真・動画のグルーピングなどの写真・動画の管理機能を有する。
本システムの肝となる写真・動画と地物との紐づけは、次の手順で行う。
まず、開発したCityGMLパーサーにより、3D都市モデルから鉄道関連地物を抽出し、テーブル形式のデータベースに格納する。次に、後述の「ルート管理システム」において作成した飛行ルート上のWaypoint(通過地点)ごとに、データベースに格納した鉄道関連地物を撮影対象として設定する(Waypointの最近傍にある地物が自動的に設定される)。なお、飛行ミッションごとのWaypointの情報は「インフラ管理システム」にも保存される。この設定情報に基づいて実際にドローンが撮影を行った後、「ルート管理システム」において内部ストレージに写真とともに撮影対象のメタ情報(撮影日時、撮影地点の緯度経度、フライトミッション名)を保存する。最後に、ドローンの飛行によって取得した写真・動画を「インフラ管理システム」のデータベースに入力し、写真のメタ情報に含まれる撮影時刻とWaypointの通過順序を突合することにより、各写真がどの地物のものかを判定し、紐づけを行う。それらの写真・動画を、紐づけられた地物のデータベースに格納する。
本システムの各機能はフルスクラッチで開発し、データベースにはAmazon RDS(Relational Database Service)を、写真・動画データの保存先にはAmazon S3(オンラインストレージサービス)を用いた。また、Waypointごとの撮影対象の地物情報を設定する方法は、カメラで撮影する範囲や被写体であるROI(Region of Interest)特定するための独自技術のアルゴリズム(特開2023-057580)を用いて実装した。
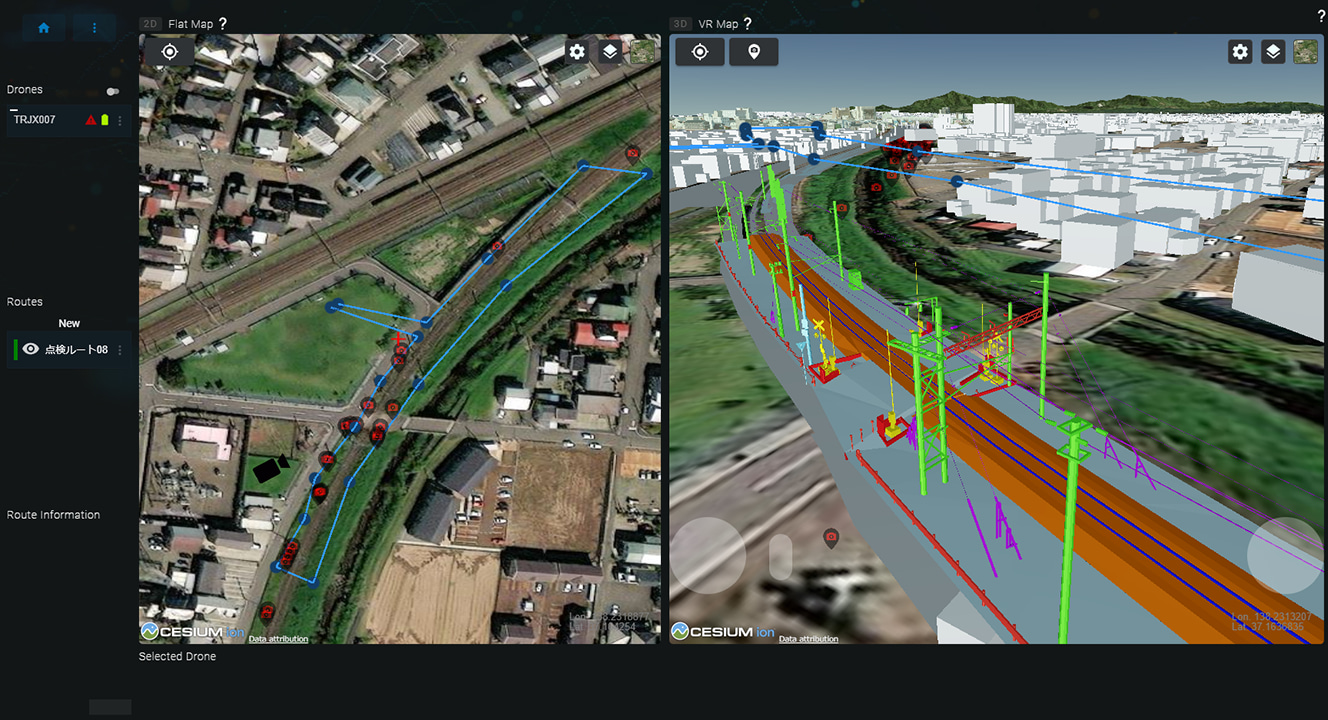
「ルート管理システム」は、鉄道点検業務向けに線路上の飛行ルートを生成する「ルート生成サブシステム」、航行中のドローンを監視し、鉄道の接近を検出する「ドローン管制サブシステム」、鉄道車両の動的な位置情報を取得する「移動体位置情報取得アプリ(TRJX Mobile)」で構成される。「ルート管理システム」で利用する3D都市モデルや障害物情報等は、PostgreSQLで構築したオンプレミスサーバー上のデータベースに格納し、AWS上で動作する「ルート生成サブシステム」と「ドローン管制サブシステム」から参照する構成としている。
「ルート生成サブシステム」は、3D都市モデルを活用した飛行ルート生成のための仕組みである。
鉄道用地外の空域については、ユーザーがWaypointを指定することで安全性の高いルートを自動的に生成する。自動生成では、3D都市モデルの属性情報を利用し、学校、病院、文化的な価値の高い施設、交通量の多い道路等のグラウンドリスクが高い地物を回避しつつ、最短経路を算出するアルゴリズムを実装している。
鉄道用地上空の飛行については、ユーザーが点検対象地物(レールや架線柱など)をシステム上で指定することで、当該対象地物の撮影に必要な飛行ルートが自動生成される仕組みとなっている。鉄道用地上空の飛行経路設定に当たっては、CityGMLパーサーにより抽出した交通(鉄道)モデルの交通補助領域(Auxiliary Traffic Area)を利用し、ドローンの飛行可能領域を設定している。
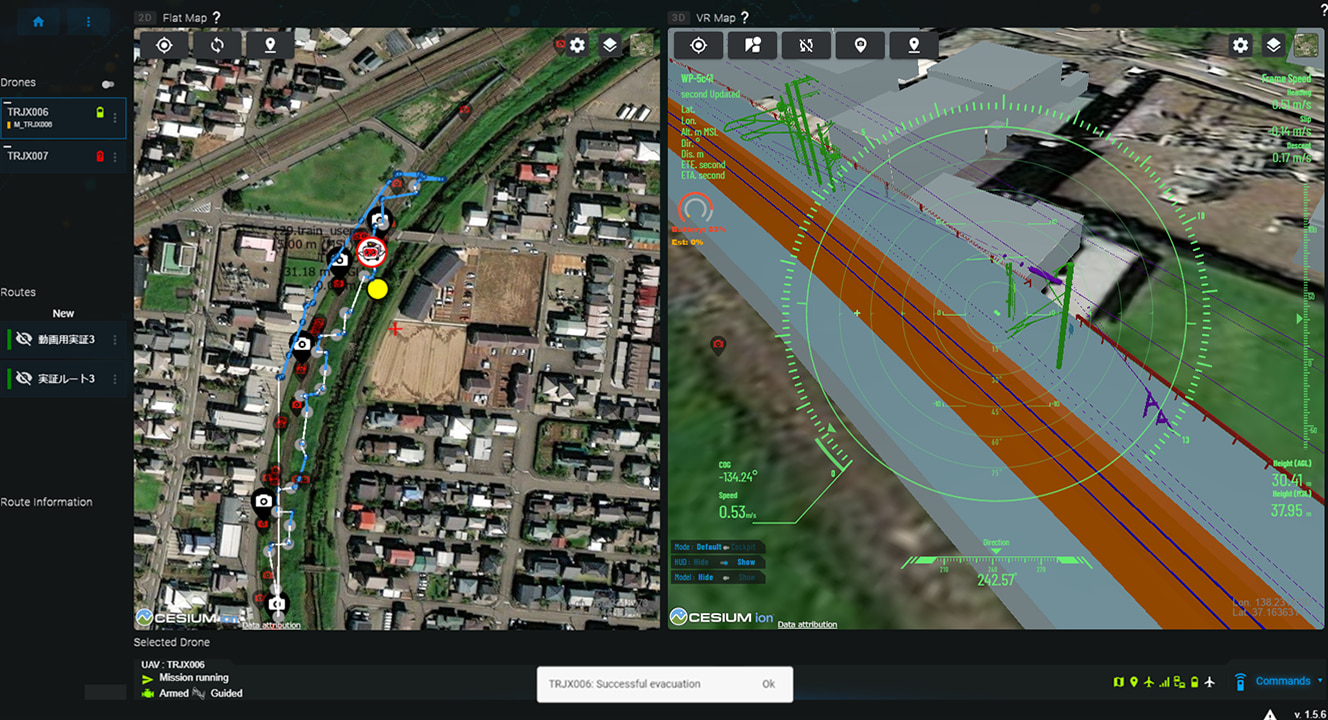
さらに、鉄道車両の運行予定時刻に合わせ、鉄道車両の前後1㎢程度をドローンの侵入不可領域として設定する動的なジオフェンス生成の仕組みを構築している。ジオフェンスは空間ボクセルの形式で構築しており、ルート生成の際に飛行時刻の指定を行うことでジオフェンスの有無を判定し、安全な飛行ルートを自動的に生成する。
また、実際の飛行中に鉄道車両が接近を検知した際には、安全な地点まで退避するルートを自動生成し、機体に送信する機能を有する。これらの機能により、鉄道用地の幅が狭くドローンの退避場所が確保できないような場所においても、鉄道用地外のリスクが低い場所へ退避することが可能となっている。
本システムはGO言語を用いたフルスクラッチで開発しており、バーチャルトンネル内を最短距離で結ぶルートの生成にはダイクストラ法をベースとした三次元的なルート探索アルゴリズムを用いている。
「ドローン管制サブシステム」は、ドローンの管制に必要な機体位置等の情報や、機体を制御するための離発着等のコマンドを送信する機能を有するシステムである。また、鉄道の接近を検知した場合にMAVLink(ドローン等の機体制御プロトコル)によるリモート制御中のドローンやLTE等で接続するGCS(Ground Control System)に対してリアルタイムで警報を送信する機能を有する。
本システムは既存の独自システム(TRJX)に対して、後述の「移動体位置情報取得アプリ(TRJX Mobile)」から鉄道車両の位置を取得する機能、線路周辺の飛行中に鉄道車両の接近を通知する機能、鉄道用地境界付近までドローンを自動的に退避させる機能、自動退避ルートを「ルート生成サブシステム」から取得する機能を追加実装して構築した。その際、鉄道車両の接近を通知するGCS APIについてはgRPC-APIを、ドローンの自動退避のためのGOTO コマンドAPIについてはREST-APIを利用して開発した。
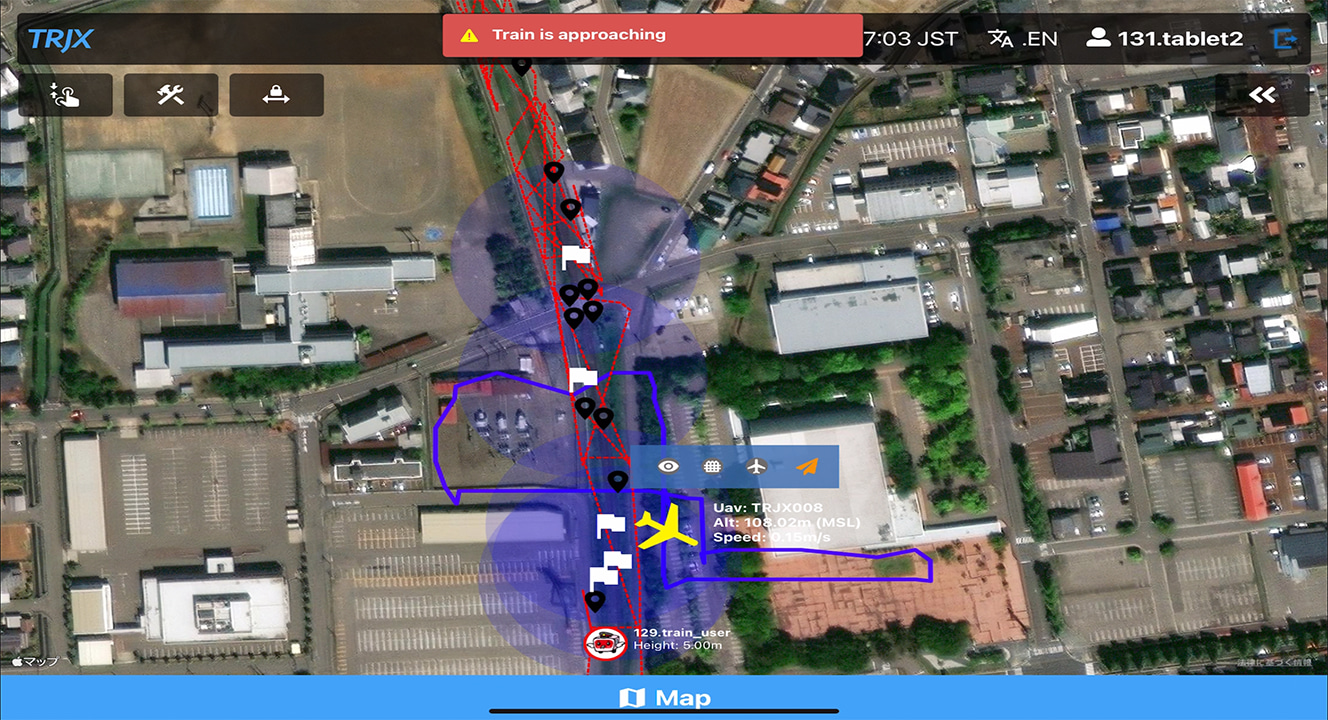
「移動体位置情報取得アプリ(TRJX Mobile)」は、飛行中の安全確保や鉄道の遅延対応のために、運行中の鉄道車両の動きと連動させてリアルタイムで位置情報を取得するモバイルアプリケーションである。本アプリケーションをインストールしたタブレット端末(iPad)を鉄道車両に持ち込むことで、GPSを利用して鉄道車両の位置情報を取得することができる。「ドローン管制サブシステム」はこの位置情報を受信し、周囲を飛行中のドローンに対して距離に応じた鉄道車両の接近通知・警報の発出を行う。
本アプリケーションはiOS SDK及びReactを利用して開発しており、「ドローン管制サブシステム」との通信についてはgRPC-APIとREST-APIを用いている。また、位置情報の管理に空間IDライブラリのボクセル形式を用いることで、処理の高速化を図っている。
これらのシステムの有用性評価として、「インフラ管理システム」により、ドローンで撮影したえちごトキめき鉄道の各設備の写真が3D都市モデルに関連付けられること、「ルート管理システム」により、地上の点検対象物を撮影するための安全な飛行ルートが生成されることの2点を確認するため、実機飛行及び鉄道事業者・点検事業者へのアンケートを行った。
実機飛行では、異なる特徴を持つDJI社製Matrice300RTKと空解社製QU-KAIQ650の2つのドローンを利用した。Matrice300RTKは一般的な点検のための要件を満たすDJI社製H20Tカメラ(4K撮影に対応し、ズームレンズを搭載)を搭載可能なドローンであり、他方で、QU-KAIQ650はMAVLinkに対応するドローンである。
検証で得られたデータ・結果・課題
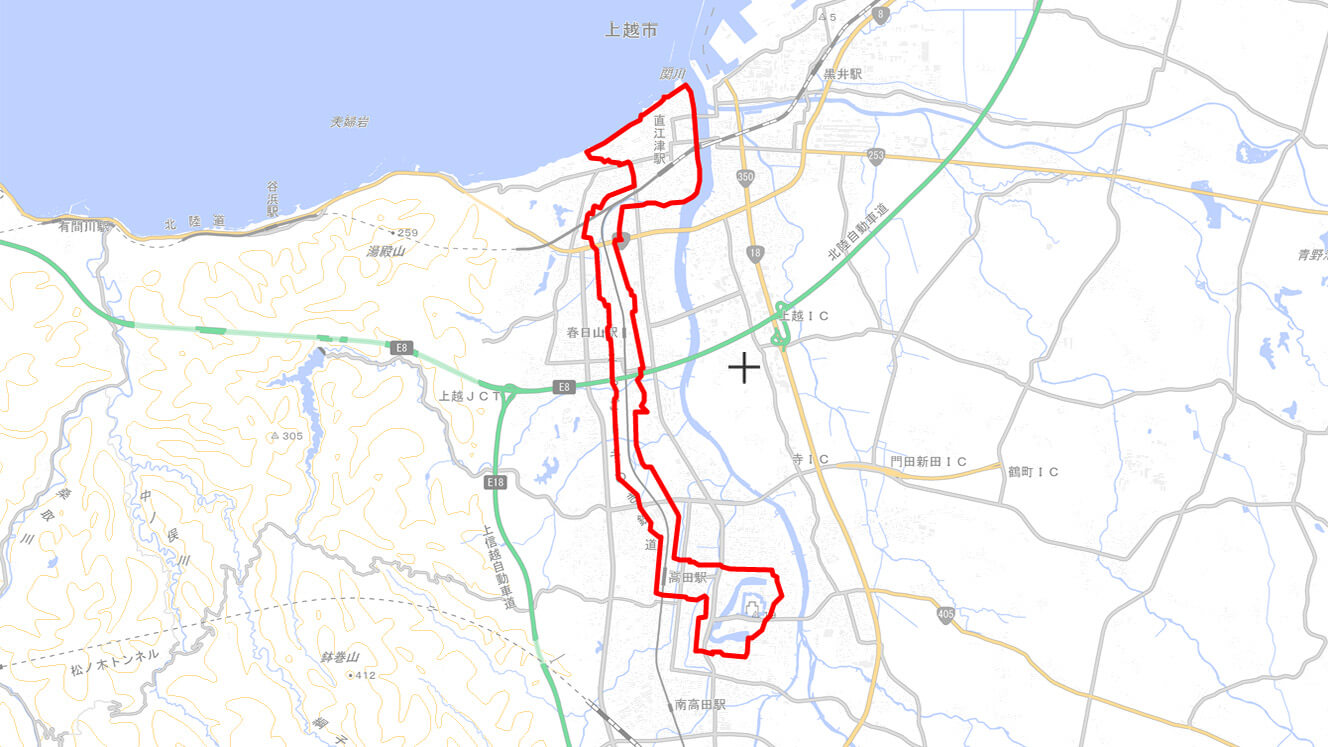
今回の実証実験では、えちごトキめき鉄道の妙高はねうまラインを対象として、開発したシステムの有用性を実機飛行及び鉄道事業者・点検事業者へのアンケートによって検証した。
「インフラ管理システム」の検証としては、ドローンで撮影した写真と3D都市モデルの地物が正しく紐づけられるかを確認した。点検対象物の撮影は、構造物の密集度が異なる2つの区間(春日山駅周辺の構造物が密集する区間と、直江津駅と春日山駅の中間で構造物の密度が低い区間)において行った。
その結果、架線柱、遮断機、フェンス、レール、架橋等の事前に設定した点検対象物が、10m2あたり最大20個という密集した状態でも正しく関連付けられることが確かめられた。
また、撮影した写真の画角や精細さ(特に、ブレがないこと)について点検事業者が評価を行ったところ、その写真を用いて目視で異物や破損の有無の確認が可能であり、特段問題がないことが確かめられた。
さらに、本システムのUX/UIの評価のため、鉄道事業者・点検事業者を対象として、地図上に表示された点検対象物を選択し、表示された写真を目視で点検する操作と、過去の写真との比較を行う操作について、体験・確認及びアンケートを行った。その結果、地上から見上げる従来のアングルよりも構造物が立体的に把握できた、写真・動画でも管理施設の状態が確認できた、現場写真と点検結果を手作業で関連付けする煩雑な作業が効率化されてよい、といった意見があった。操作性については、シンプルで詰まらずに操作できた、地図から検索する方法は直感的で良いといった評価があった一方で、本システムで採用した点検の結果や問題点をテキスト形式で入力する方法よりも、詳細な点検項目を管理する台帳形式のUIを望む声もあった。
「ルート管理システム」の検証としては、本システムで生成したルートが敷地内に収まっていることの確認と、実機飛行により実際に安全に飛行できることの確認を行った。実機飛行は、えちごトキめき鉄道はねうまラインの直江津駅から春日山駅までの約3.0kmの区間で、点検対象物の撮影を伴うルートを設定して行った。
その結果、本システムで生成したルートが鉄道事業者の所有する用地の内側に収まっていることが確認できた。また、実機飛行による検証では、鉄道事業者の立合いのもと、線路上空を通過するルートを設定し、鉄道が運行する時間帯においてドローンが鉄道車両の通過タイミングを避けて安全に飛行することが確認できた。なお、実証実験における安全性を確保するため、ドローンの飛行中は、「移動体位置情報取得アプリ(TRJX Mobile)」をインストールしたiPadを持ったスタッフ2名が上下線の運行車両に乗車し、ドローン操縦者にその位置を通知することで安全管理を実施した。
これらの検証により、3D都市モデルを利用することで、ドローンを用いた安全性の高い鉄道インフラの撮影と、撮影したインフラの写真の直感的な管理が可能となり、点検業務の効率化に寄与する可能性があることが分かった。
その一方で、鉄道車両の接近をドローン操縦者に通知するため、アラート表示、鉄道車両の位置表示及び飛行禁止エリアの表示の機能を実装したことで、複数の鉄道車両が同時に動くようなケースにおいて、システム負荷が高まる場面が見られた。本システムにおいては、応答性能は安全性に直結するため、飛行禁止エリアを示す空間IDのズームレベルの最適化、システムの処理性能の向上、クライアント・サーバー間の通信トラフィックの軽減等の改善が求められる。


参加ユーザーからのコメント
・ドローンを広域かつ高精度で管制制御する技術を確立することで、鉄道沿線の巡回や異常時の設備点検を大幅に省力化、迅速化することができる。
・線路施設の点検は人が線路上を歩くなど人海戦術で行っている部分がある。ドローンのような新しい技術で現場の作業が代替できるというのは大変興味がある。
・現在の点検の仕組みで施設の状況を把握はしているが、高所の吊下げ金具の状態などは上空から撮影した写真でよく見えることが分かった。俯瞰の視点があると気づく範囲が広がる。
・今回は屋外での実証であったが、トンネルの壁面の点検にも活用できるか検討したい。
今後の展望
今回の実証実験の結果を踏まえ、鉄道事業者向けサービスとして、鉄道施設の保守・点検業務の一部を代替するアプリケーションを展開することを目標とする。まずは鉄道車両の本数が少ない地域路線を中心に活用を広めたい。
鉄道関連施設には高度の安全性を実現するための多くの点検項目があるため、点検結果の記録・管理を効率化する点にもニーズがあることが分かった。このため、サービスとして広く展開するにあたっては、写真・映像以外にも個々の施設について点検した項目の台帳化や台帳と映像とを関連付けたユーザーインタフェースの提供が必要になる。
また、鉄道の位置情報の取得について、今回の検証ではiPadを持ったスタッフが乗車してGPSで位置情報の取得を行ったが、より広域を対象とすることや、別会社の車両の乗り入れや臨時電車の運行が日常的にあることを考えると、将来的には鉄道運行システムに直接API等で接続し、リアルタイムで正確な位置情報を取得することが不可欠である。
国内の鉄道線路の総延長距離は約27,000kmであり、本システムによる鉄道施設の保守・点検業務は高いポテンシャルを有している。3D都市モデルが現在未整備の地域にも整備が進むことで、本システムの導入可能範囲は今後も拡大すると予想される。将来的に鉄道事業者のドローン活用が広がり、安全性の検証が進んだ後は、鉄道線路上空のドローン物流航路の整備や、災害時の鉄道設備の被災状況確認(臨時点検)など他のユースケースの創出につながる可能性があることから、これらの改善を図りつつ、本システムの実装路線の拡大を目指す。
Technical Report