第6期
先進安全自動車(ASV)推進計画
成果報告について
先進安全技術普及分科会における活動
安全技術のあり方検討WG
自動運転を前提としたASVの基本理念等の再検討

ASV技術の開発・普及が正しく進むように、基本理念と開発指針を策定しています。これまで、ASV技術はドライバーの支援が前提となっていましたが、近年の自動運転技術の開発が活発化していることを受け、運転の一部又は全部をシステムが行う(自動運転)技術もASV技術として取り扱うため、基本理念等の再検討を行いました。
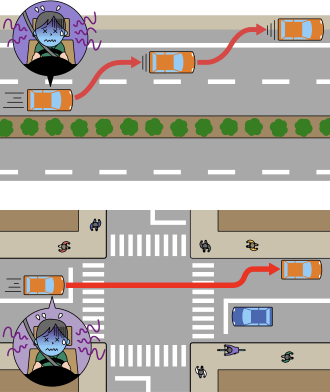
混在交通下に自動運転車を導入した際の影響及び留意点の検討
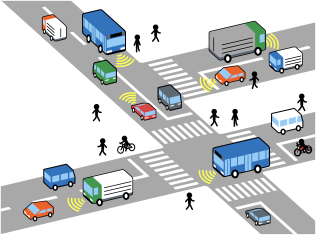
自動運転車の実用化を進めるにあたり、他の交通参加者といかに安全に混在できるかが重要です。自動運転車と他の交通参加者が混在する際に留意すべきシーンや留意点を検討し、自動運転システムを開発する際の配慮事項として整理しました。
普及戦略検討WG
ASV技術の共通定義
自動運転に関する用語


将来技術実用化分科会における活動
ドライバー異常・監視技術検討WG
路肩退避型等発展型ドライバー異常時対応システムの技術要件と課題検討
このシステムは、体調急変により運転中のドライバーが安全運転を継続できなくなった場合の緊急措置として、ドライバーに代わり可能な限り路肩等のより安全な場所に車両を退避させたのちに停止させるシステムです。
また、このシステムは配慮すべき他の道路ユーザーとしての歩行者や自転車の有無、交差点や踏切等、その場所に車両が停止することで渋滞や二次的な事故を引き起こす場所の有無等、技術的要件や配慮すべき事項等に差異があることから、高速道路版と一般道路版の2つに分けて検討を行いました。
ドライバー異常検知手法の技術要件等

ドライバーモニタリング手法の技術要件等
このシステムは、ドライバーの眠気や脇見によって安全運転を継続できない可能性のあるドライバーの状態を検知し、ドライバーに報知するシステムです。
自動認識技術等検討WG
電子牽引による後続無人隊列走行システム
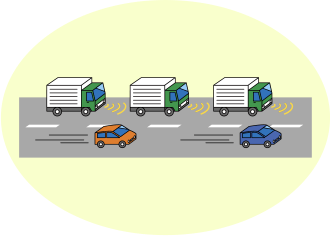
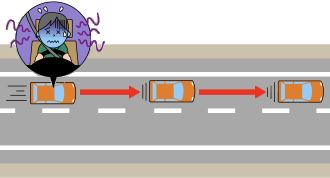
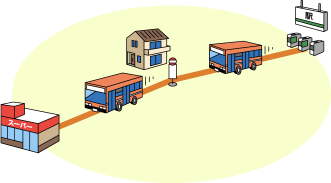
隊列走行とは、車両を電子連結技術により一体に制御し、複数台のトラックが隊列車群を構成して走行するものをいいます。
このうち電子牽引による後続無人隊列走行システムは、運転者が乗車する牽引車の後方に1台または複数台の無人の車両が、あたかも牽引されているように追従し、隊列として走行するものです。
ISA
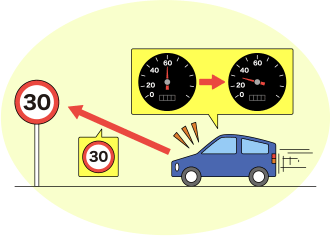
このシステムは、車載フロントカメラや、カーナビゲーションシステムの地図データベースを用いて、ドライバーの不注意(漫然運転)や誤操作による速度超過を抑制することを目的としたものです。
ラストマイル自動運転車両システム
このシステムは、自動運行装置搭載車両が、狭く限定された移動範囲を前提とした移動サービス等にもちいられるものです。
ラストマイル自動運転車両システムの設計を行う際に考慮すべき技術的要件等について、動的な運転タスクをおこなう自動車の観点から例示的にガイドラインとしてまとめました。
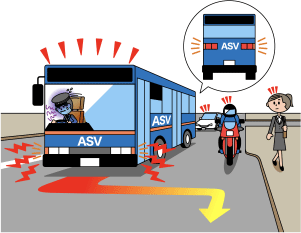
大型車向けの側方衝突警報装置
この装置は、大型車が右左折、車線変更、および交差点への進入を起こそうとする際に、ドライバーに対して自車周辺の障害物との衝突の危険を知らせるものです。
統合制御型可変式速度超過抑制装置TF
統合制御型可変式速度超過抑制装置
この装置は、重量車の速度超過の防止を支援することを目的とした、複数の機能を統合的に使用することにより、運転者が設定した速度以下になるように速度を制御し、安全速度の維持を支援するものです。
ASVの基本理念
安全運転の原則
●操縦の主体がドライバー、システムのどちらであるかを明確にすること。
●操縦の主体がドライバーの場合、システムはドライバーの安全な操縦を側面から支援し、操縦の主体がシステムの場合は、システムが安全に操縦を行う
ユーザー受容性の確保
●ユーザーフレンドリーであるためにヒューマン・マシン・インターフェイス設計が適切になされていること。
●ドライバー含めユーザーにとって使いやすく、安心して使えるような配慮がされていること。
社会受容性の確保
●社会的コンセンサスが得られること。
●社会から正しく理解され、受け入れられるよう配慮がされていること。
運転支援、自動運転の考え方
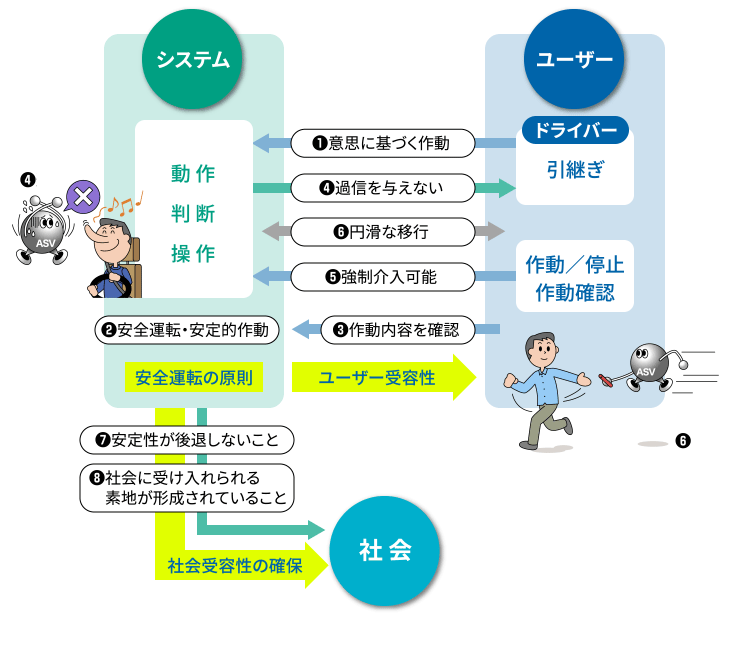
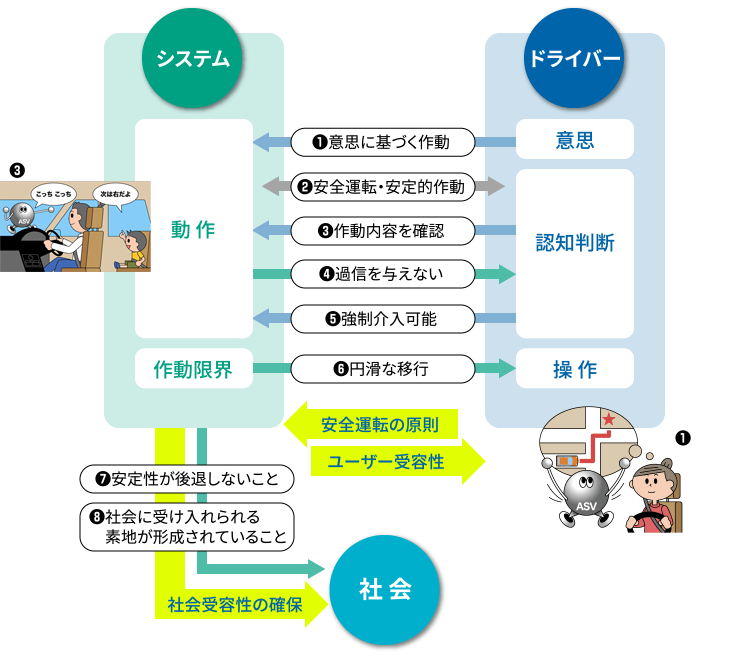
基本理念の細則を“運転支援・自動運転の考え方”という名称として8つにまとめました。
- 意思に基づく作動
- 安全運転・安定的作動
- 作動内容を確認
- 過信を与えない
- 強制介入可能
- 円滑な移行
- 安全性が後退しないこと
- 社会に受け入れられる素地が形成されていること
安全な交通社会実現のためには、ドライバーをはじめとするユーザーとシステムと社会の関係が有効に保たれ、それぞれがその役割を実行する必要があります。上記8つの運転支援・自動運転の考え方を、ドライバーをはじめとするユーザー、システム、社会の3者の関係に当てはめたものについて、操縦の主体がドライバーの場合、また操縦の主体がシステムの場合について以下の図にまとめました。
ドライバーとシステムと社会の関係(操縦の主体がドライバーの場合)
ユーザーとシステムと社会の関係(操縦の主体がシステムの場合)