tpc16
TOPIC 16|ROSで活用する【近日公開予定】
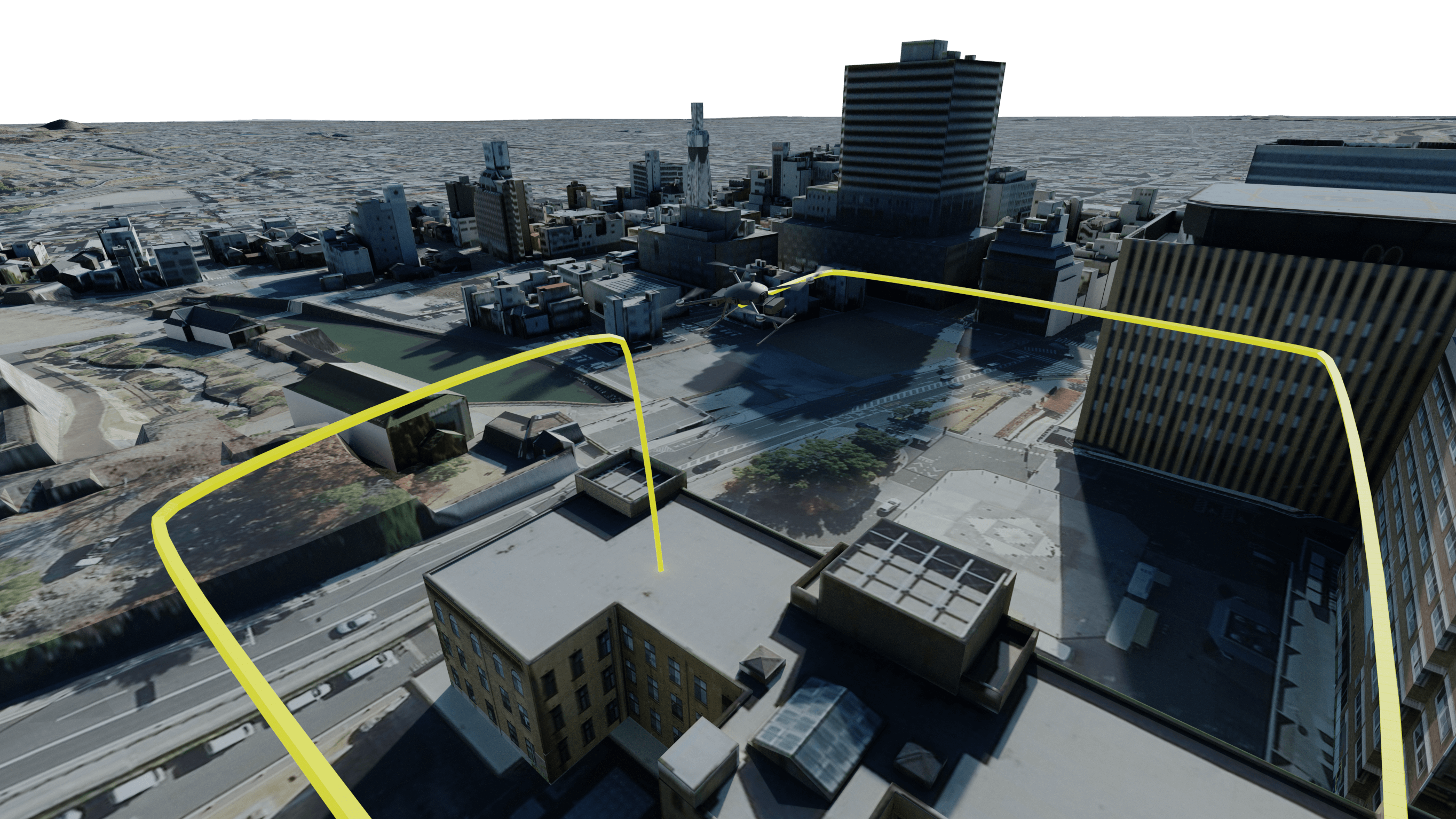
ROS(Robot Operation System)は、ロボットを作る際に使うソフトウェアプラットフォームです。このトピックでは、ROSでPLATEAUを活用する方法を説明します。
Share
・・
PLATEAU(プラトー)は、国土交通省が主導する、日本全国の3D都市モデルの整備・活用・オープンデータ化のプロジェクトです。
本チュートリアルは、PLATEAUの3D都市モデルを初めて使うみなさんに向けた、技術解説集です。各種分野においてPLATEAUで実際に開発を進める専門家の監修を受け、すぐに活用できる実践的な内容をお届けします。
ROS(Robot Operation System)は、ロボットを作る際に使うソフトウェアプラットフォームです。このトピックでは、ROSでPLATEAUを活用する方法を説明します。
【監修】
大畑 成史(株式会社センシンロボティクス)、安谷屋 樹(アダワープジャパン株式会社)、多葉井 宏(株式会社竹中工務店)