都市モデルを活用した運送事業者の訓練用ドライブシミュレータ
| 実施事業者 | 株式会社フォーラムエイト |
|---|---|
| 実施協力 | 日本通運株式会社 / 東武バスウエスト株式会社 / 株式会社つばめタクシー / 公益社全日本トラック協会 |
| 実施場所 | 埼玉県さいたま市 |
| 実施期間 | 2026年1月 |
実在都市の3D都市モデルと交通流を統合し、現実に近い市街地環境で実践的な訓練を提供するドライブシミュレータを開発。運転行動を数値化するデータ駆動型アプローチにより、運送事業者における属人性を排した効率的なドライバー育成と交通安全の向上に寄与。
本プロジェクトの概要
物流・運送業界が直面する「2024年問題」に起因するドライバー不足、そして複雑化する交通環境における安全確保は、喫緊の社会課題である。従来の運転訓練は指導員の経験に基づくOJTに依存しており、シミュレータを導入する場合でも、実際の業務ルートとは乖離した架空の都市を走行する汎用的な製品に限定されていた。そのため、実務に即した実践的な危険予測能力の育成には限界があり、2024年問題への対応が急務となる中で、訓練の効率化を抜本的に推進する手段は確立されていなかった。
本プロジェクトでは、これらの課題解決を目指し、3D都市モデルを活用して実在都市空間を忠実に再現した訓練用ドライブシミュレータを開発する。3D都市モデルに交通・人流シミュレーションを統合し、現実の都市が持つ複雑な道路形状や日々変化する交通状況、突発的な危険事象などを反映した、実践的な訓練環境を構築する。これにより、特定の都市をモデルとした標準的な訓練の提供はもちろん、事業者のニーズに応じて日常業務ルートを個別に再現することも可能となり、目的に応じた多様なシナリオでの実践的訓練が実現する。実車では危険を伴う状況を安全に体験することで、より効果的な危険予測能力の向上が期待できる。さらに、運転操作のログを客観的に記録・分析することで、指導員の経験や感覚に依存していた属人的な教育から、データに基づいた定量的な評価・指導への転換を促す。本実証を通じて、この新たな訓練手法の有用性と汎用性を評価し、運送業界の安全性向上と持続可能性に貢献するソリューションとしての社会実装可能性を検証する。
実現したい価値・目指す世界
物流・旅客運送業界は、EC市場の拡大といった需要増加を背景に、社会に不可欠なインフラとしての重要性を増している。一方で、「2024年問題」に代表される労働時間規制の強化に直面し、ドライバー不足は深刻化、生産性の向上が急務となっている。この状況下で、新規ドライバーの早期戦力化と、全ドライバーの安全教育の高度化は、事業継続における最重要課題である。
しかし、従来の教育手法は多くの課題を抱えている。先進的な事業者が導入するシミュレータは、その多くが架空の都市を舞台とした汎用的なものであり、ドライバーが日常業務で走行する複雑な市街地の地理的特徴を反映しきれないため、より実践的な訓練効果の追求には課題があった。一方で、訓練の大部分を占めるOJT(On-the-Job Training)は、指導員の経験や感覚に依存するため教育の品質が標準化されず、属人的な指導から脱却できていない。また、実車での訓練では、危険な状況(ヒヤリハット)を意図的に再現することは安全上の制約から困難であり、実践的な危険予測能力を体系的に養う機会が不足していた。
本プロジェクトでは、3D都市モデルに交通・人流シミュレーションをリアルタイムで重畳させることで、現実世界を忠実に再現したデジタルツイン空間を構築し、そこで動作するドライブシミュレータ訓練システムを開発する。これにより、従来の教育手法が抱える課題を根本から解決する。開発するシステムは、以下の3つの中核機能から構成される。
1.実在都市空間の再現機能
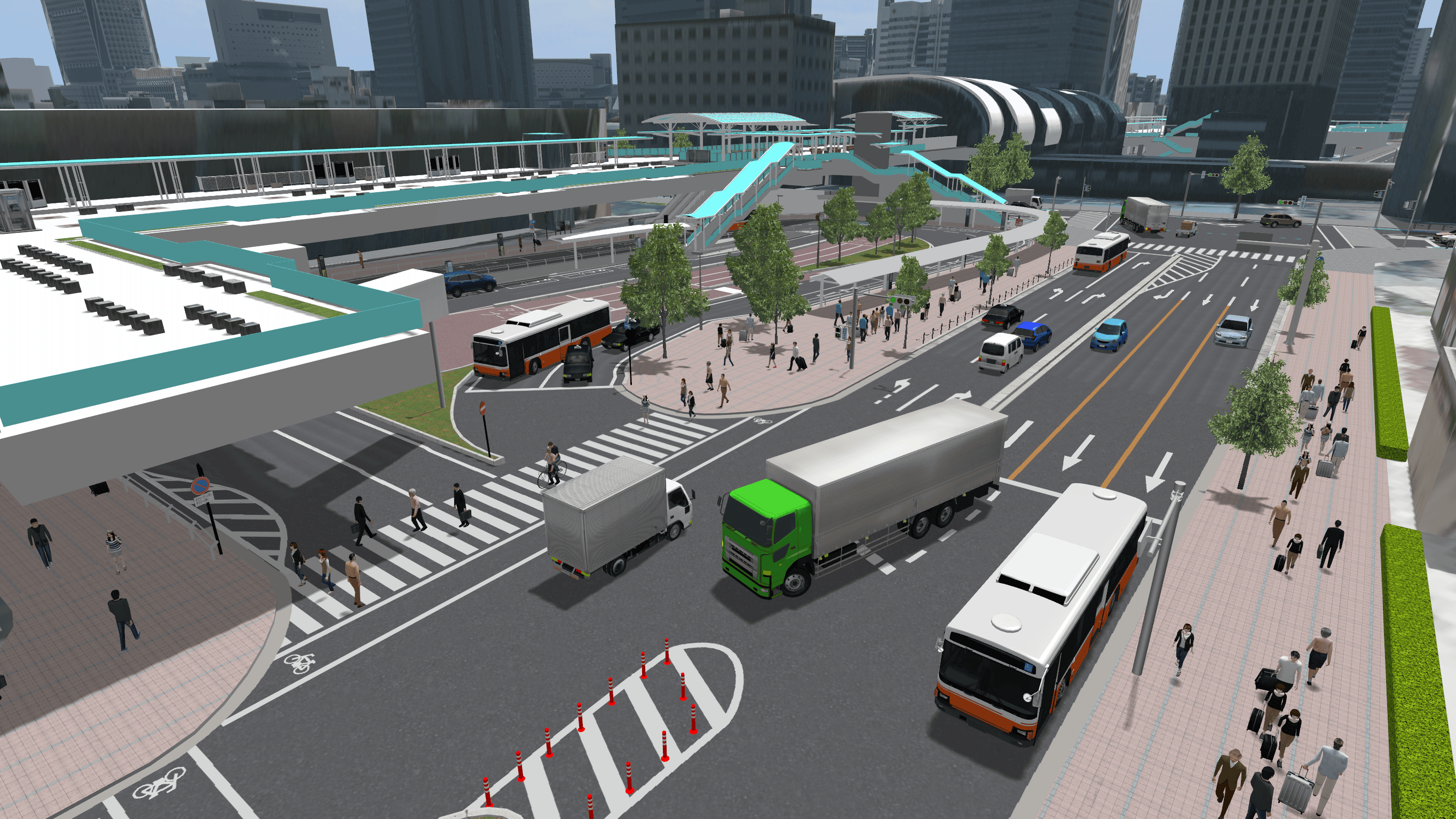
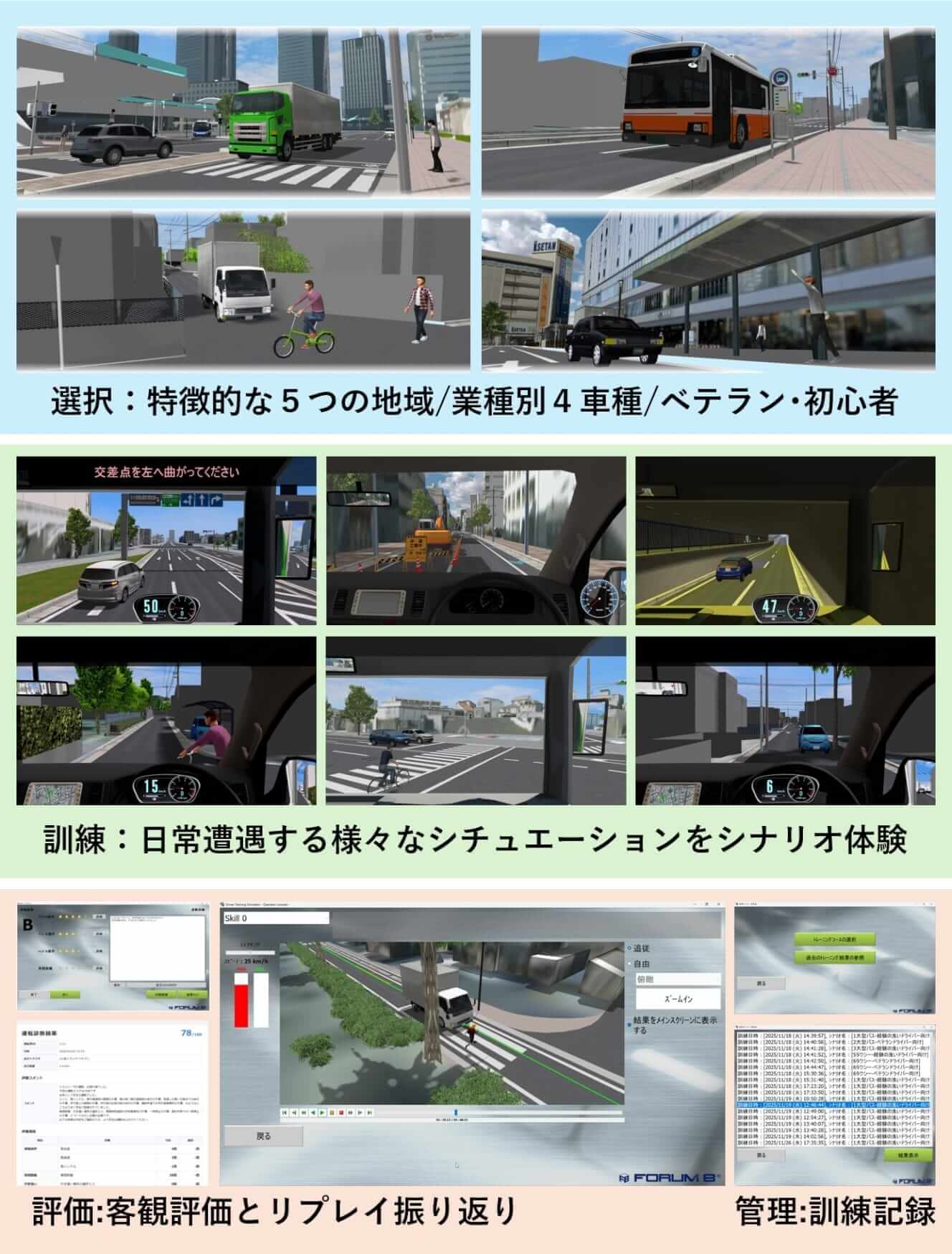
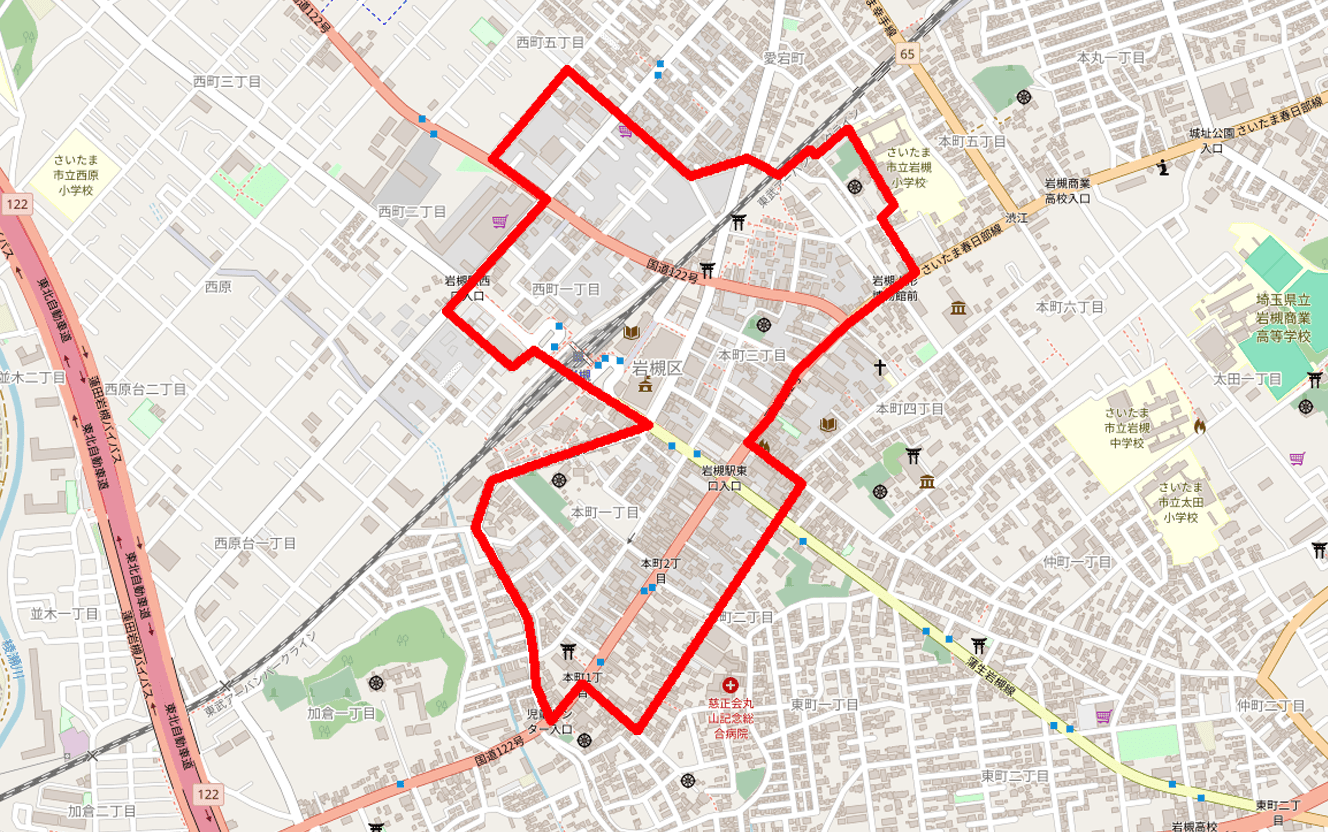
建築物、都市設備、橋梁の3D都市モデルを活用し、高精細な都市景観を再現する。これにより、標準コンテンツとして特定の都市での汎用的な訓練を提供するとともに、事業者の要望に応じて、特定の配送ルートやバス路線といった業務に直結するコースを個別に構築することも可能な、柔軟な訓練環境を実現する。
2.運転評価・振り返り機能
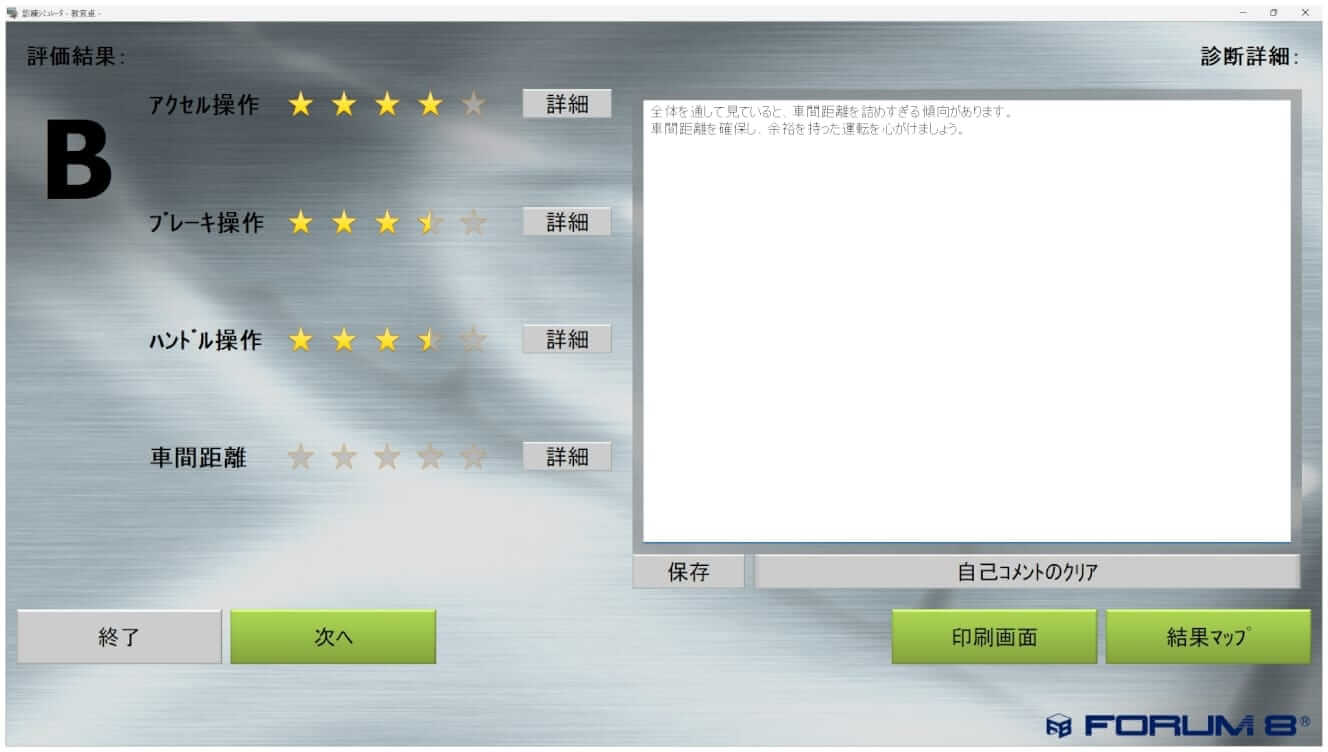
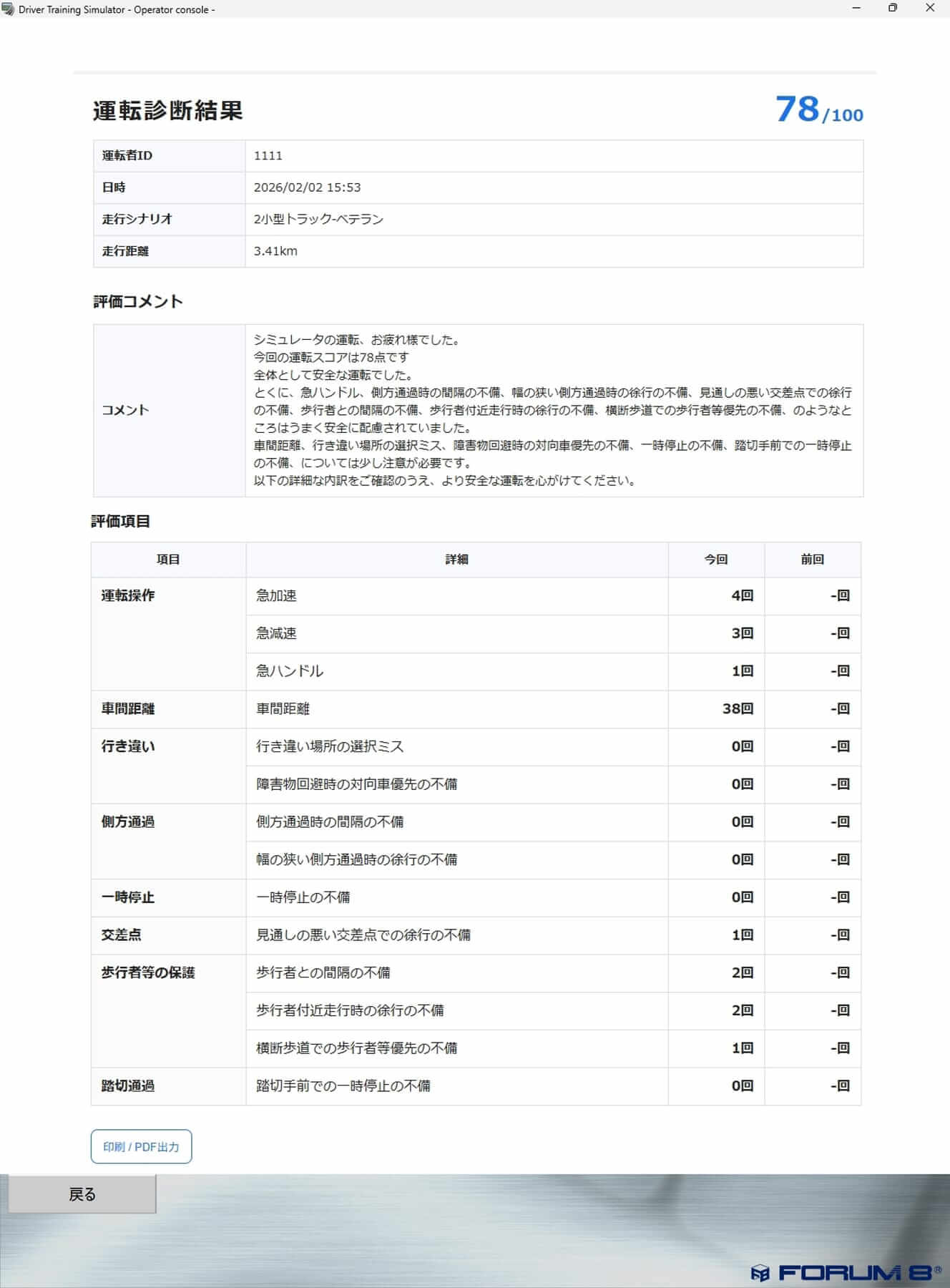
訓練中の急ハンドルや速度超過といった運転行動をログとして記録・数値化し、客観的なデータに基づいて運転スキルを評価する。リプレイ機能により、様々な視点から自身の運転を振り返ることができ、ドライバーの課題認識と改善を促す。これにより、指導の属人化を排し、教育の標準化と効率化を実現する。
3.車種・経験別訓練シナリオ設計機能
大型トラック・バス・タクシーなど、車種ごとの操作感や死角といった物理特性を忠実にシミュレートする。さらに、初心者向けの基本操作習熟から、ベテラン向けの危険予測訓練(ヒヤリハット再現)まで、ドライバーの経験レベルや教育目的に応じた多様なシナリオを設計・提供する。
本プロジェクトで開発する新たな訓練ソリューションによって、これまでにないデータ駆動型の実践的なトレーニング環境を提供し、ドライバー一人ひとりの安全意識と運転技術を科学的に向上させることで社会課題の解決に貢献し、結果として持続可能な物流・交通インフラを社会全体で支える世界の実現を目指す。






検証や実証に用いた方法・データ・技術・機材
本プロジェクトは、3D都市モデルを基盤に現実の都市空間を忠実に再現したデジタルツインを構築し、交通流や人流の動的データを重畳させることで、運送事業者の実走ルートに即した実践的な安全運転訓練環境を提供するものである。
最大の特徴は、従来の汎用シミュレータでは到達し得なかった「実務に直結する固有の街並みと地理的文脈」を精密に再現できる点にある。従来のトレーニングは、現実には存在しない架空のコースを模した汎用シミュレータに依存しており、ドライバーが日常業務で直面する複雑な交差点や生活道路といった「実際の地理的特徴」を反映できていない。そのため、特定の場所特有の視認性の悪さを始めとした、実践的な危険予測能力を養うには限界があった。これに対し本システムは、公共測量成果に基づき位置精度が担保された3D都市モデルから建築物・都市設備・橋梁モデルといったジオメトリ情報を活用することで、ドライバーが日々走行する実在のルートを、デジタルツインとして仮想空間内に忠実に構築する。この「実在する街並み」での訓練こそが、従来の汎用シミュレータに対する最大の優位性であり、実務に即応した高度な危険予測能力の習得を可能にする。さらに、3D都市モデルは標準化されたオープンデータであるため、特定地域に限らず、データが存在する他都市への横展開やコース拡張を迅速に行える点も、本システムの大きな特徴である。
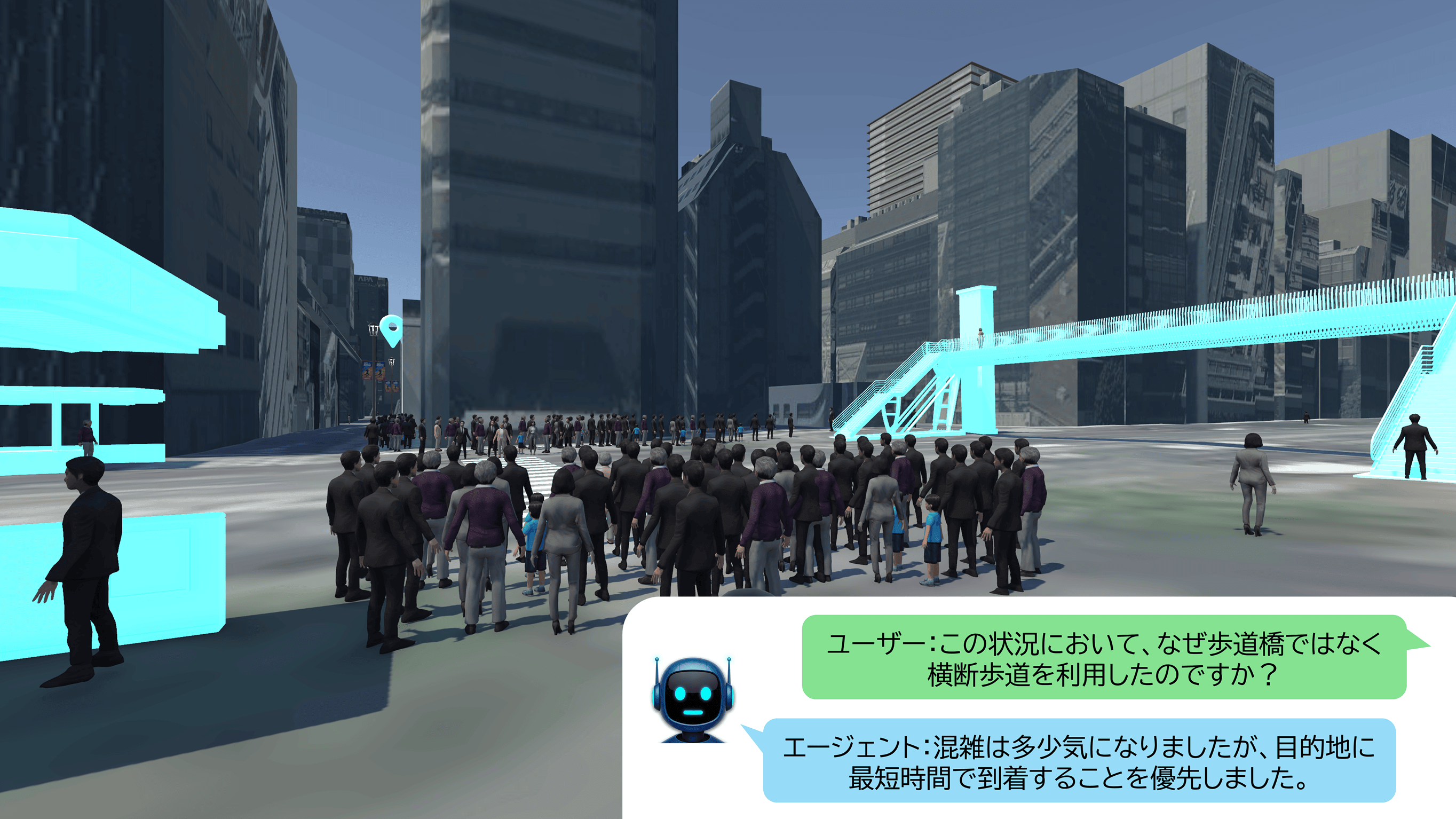
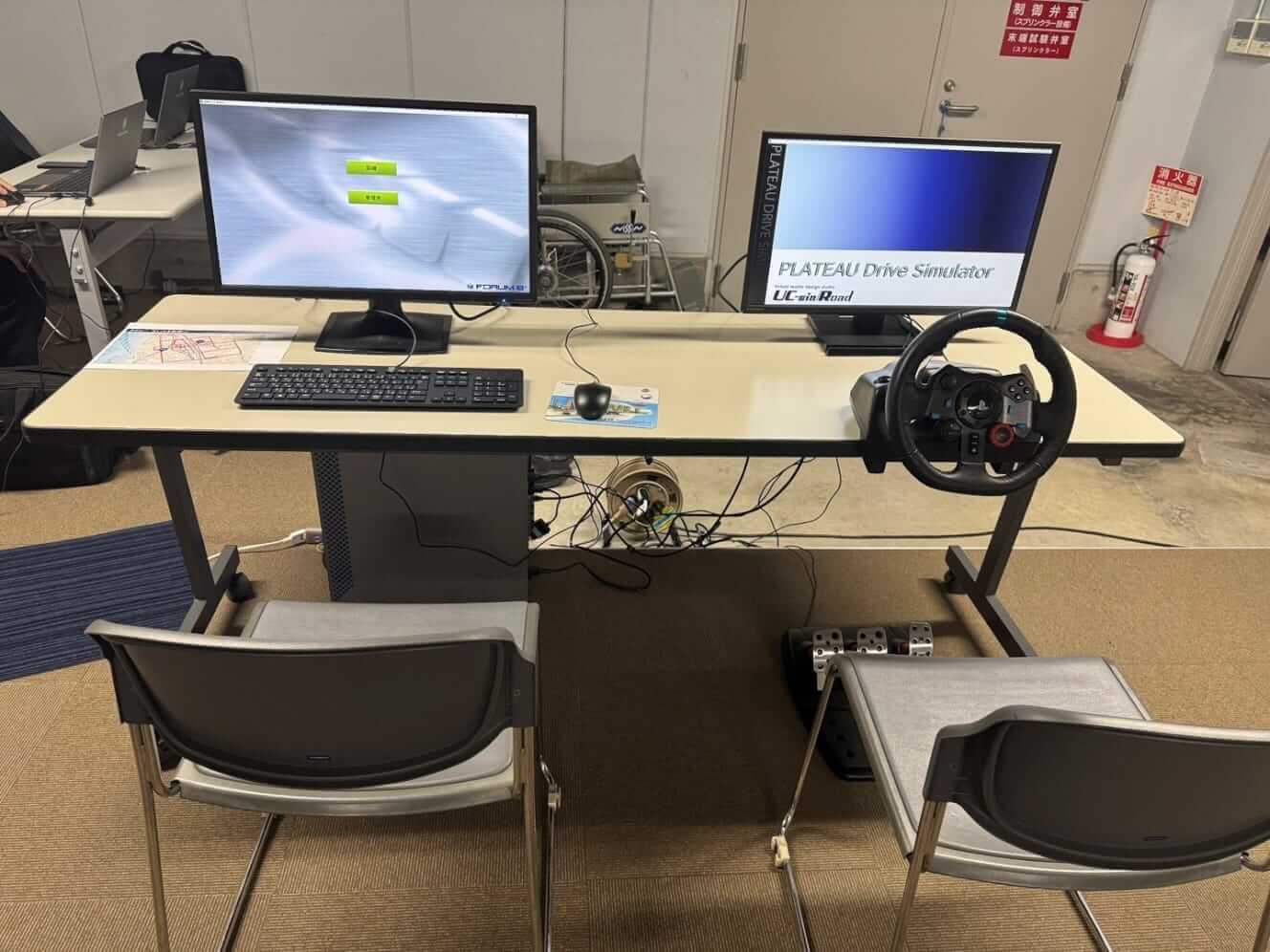
本システムは、自社開発の3DリアルタイムVRプラットフォーム「UC-win/Road」を基盤に採用した。G空間情報センターが公開するCityGML形式の3D都市モデルの該当するジオメトリ情報、建築物(LOD1/2)、都市設備(LOD3)、橋梁(LOD2)等を直接取り込むことで、ドライブシミュレータの走行ルートとなる都市骨格をデジタルツインとして忠実に再現。さらに、CSV形式等の交通センサスや自治体提供の人流データを統合することで、現実世界と遜色のない訓練用デジタルツイン空間を動的に生成する。この仮想空間内では、複数のシミュレーションエンジンがリアルタイムに連携して動作する。自車の挙動を再現する「運転シミュレーション」、周囲の車両動態を制御する「交通シミュレーション」、および歩行者の不規則な動きを再現する「人流シミュレーション」が相互に影響し合うことで、従来のドライブシミュレータが搭載している静的な3Dモデルだけでは再現が困難な、動的かつ複雑な交通環境を構築している。訓練者は、ステアリングやペダルを備えた専用のドライブシミュレータを通じて、この高度に可視化された空間内で運転を行う。実車に近い物理的な操作感と、現実の走行ルートを反映した視覚情報を組み合わせることで、仮想空間内での経験を実社会での運転技能へと直結させるインターフェースを実現している。これにより、実車では危険を伴うためトレーニング内に組み込むことが困難な状況下での実践的な運転訓練や、客観的データに基づく運転技能評価を可能とした。
訓練中の走行ログやハンドル操作といった一連の運転行動は、独自開発されたプラグイン形式の訓練システムによって逐一記録される。この記録に基づき、危険箇所での一時停止や安全確認の有無などが客観的に評価され、ドライバーへのフィードバックとして出力される仕組みとなっている。
本システムの有効性を検証するため、貨物(トラック)、旅客(バス、タクシー)という異なる事業領域の事業者3社、計32名の運転者・指導者・管理者の協力を得て、実証実験を実施した。


被験者を対象に、①3画面モニタと実物の運転席で構成され、最も没入感の高い訓練が可能な「フル版」、②1画面モニタで省スペース性に優れる「ライト版」、③ハンドルとペダルのみで構成され、手軽に導入できる「コントローラ版」という特徴の異なる3タイプのシミュレータを用いた訓練を実施した。


その上で、アンケート・ヒアリングを実施し、「都市空間再現機能の実効性」「訓練シナリオの教育効果」「ログ・評価機能の有効性」、そして「事業性・導入意向」といった、製品価値とビジネスモデルの両面から、本システムの総合的な有用性を評価した。
検証で得られたデータ・結果・課題
本実証実験におけるアンケート評価の結果については、訓練プラットフォームとしての完成度を問う「実効性」、安全意識の向上や教育的効果を測定する「有効性」、そして社会実装に向けた市場価値と持続可能性を検証する「事業性」の3軸から総括する。
本シミュレータが訓練ツールとして実用に足るかという「実効性」の検証において、「走行した街並みが実際の環境に近いか」という問いに対し、73.1%の受講者が肯定的に回答した。定性的なフィードバックでは、「見慣れた風景や道路での運転は、確認や予測の訓練として非常に有意義である」「実際の道路を強く想起でき、臨場感を持って運転できる」といった、3D都市モデルの活用による精緻な空間再現を高く評価する意見が多数を占め、ターゲットとしていた運送事業者において、実在する街並みでのドライブシミュレータへのニーズの高さが示唆された。
一方で、車両の基本的な操作感については、普段の業務車両との差異を指摘する意見も散見された。これは、シミュレータ固有の操作感への習熟や、ハードウェアのセッティングにおける最適化の必要性を示唆している。実用性の観点からは、ハードウェア構成に関して車種や事業者のニーズに応じた精査の余地を残しつつも、3D都市モデルを基盤とした空間再現という本システムの根幹は、訓練ツールとしての有用性を担保する上で十分に機能していることが示された。
事業者のニーズの例としては、ヒアリングで指摘されたバスにおけるドア操作のスイッチ、大型車用のパーキングブレーキな どのほか、トラックにおけるバックモニター、デジタルタコグラフ、排気ブレーキ、タクシーにおけるタクシーメーターや無線機な ど、車両に特有な機能の実装が考えられ、これらの必要性、訓練の有効性を精査する。
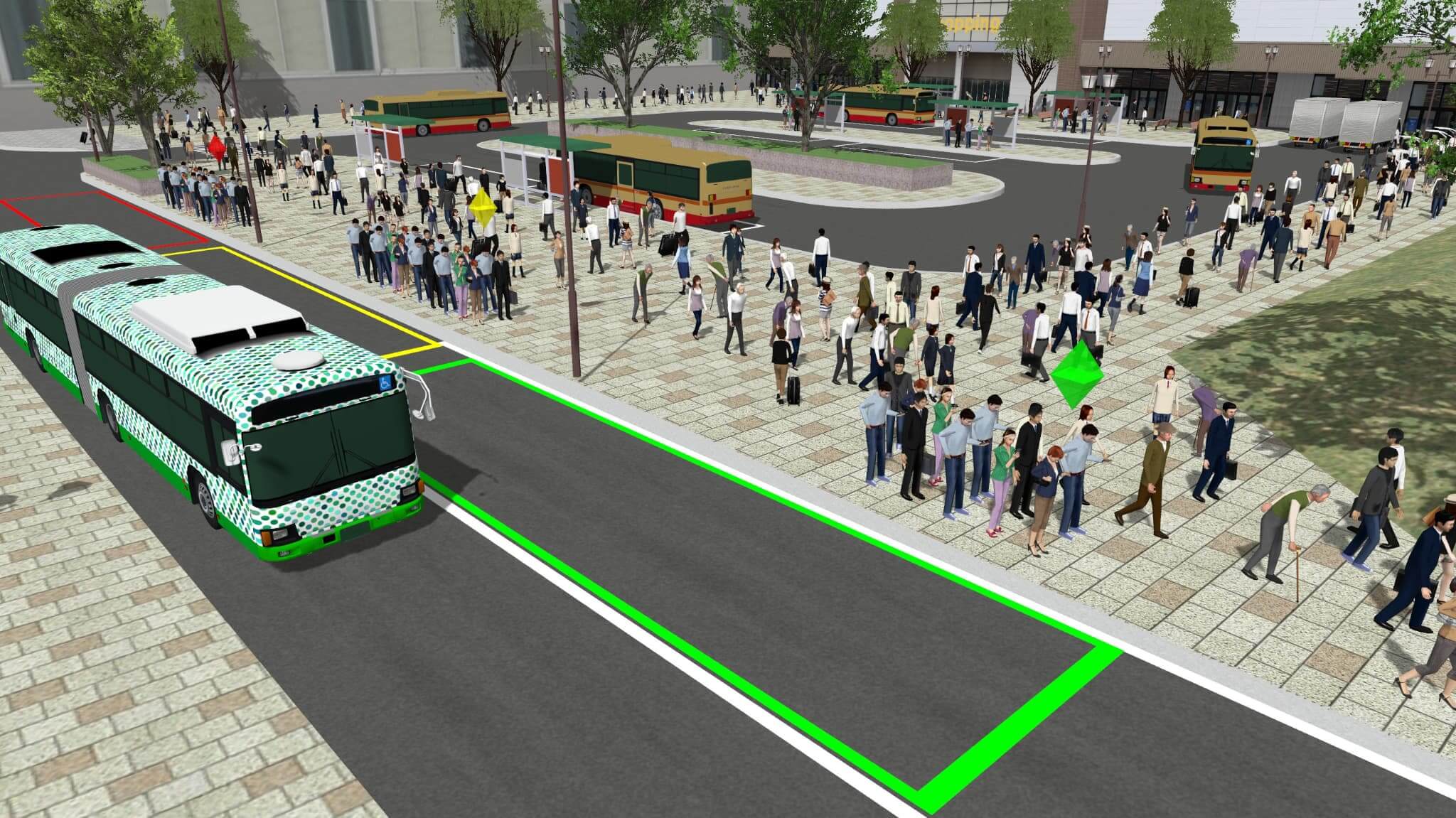
次に、本システムが安全教育ツールとして具体的な効果を持つかを検証した。ベテラン向けの「ヒヤリハットシナリオ」については、82.6%が「普段危ないと思う場所での飛び出しや、イレギュラーな事態など、効果的で訓練になると思う」と高く評価した。また、「左折時の自転車の飛び出し」「駐車車両(バス)の影からの飛び出し」など、実在都市の地理的文脈に即した危険体験が、高い教育効果を持つことが示された。また、天候や交通量を自由に変更できる「設定の柔軟性」についても89.5%が「有用だ」と回答し、VRならではの多様な環境下での繰り返し訓練への強いニーズが確認された。


さらに、運転ログを客観的に振り返る「リプレイ機能」は、79.3%が「役立った」と回答しており、「自身の運転の癖を客観的に認識できた」「指導にも活用できる」といった声が寄せられた。これらの結果から、本システムが提供する多様な訓練コンテンツと客観的な評価機能は、運転者の危険予測能力の向上や、指導の属人性解消といった点で、教育ツールとして高い有効性を持つことが実証され、指導者の属人性解消等へ寄与することで、指導者不足に悩む事業者に対しては、需要の高いソリューションとなりうるという示唆が得られた。

最後に、本システムがビジネスとして市場に受け入れられるかを検証した。管理者3名からの有効回答2名全員が、本システムを「投資価値がある」と評価した。さらに、運転者・指導者を含めた全体でも65%が肯定的に回答しており、導入への期待が高いことが示された。導入を検討する場合、最も高価な「フル版(660万円)」を希望する回答が全体の6割を超え、価格よりも実践的な訓練効果を重視する層が厚いことが明らかになった。また、企業の安全投資額の実態調査では、半数が年間「500万円以上」と回答しており、当初の想定を上回る市場ポテンシャルが存在する可能性も示唆された。これらの結果から、本事業は企業の安全投資ニーズに合致しており、高価格帯の製品であっても市場に受け入れられる蓋然性が高く、ビジネスとして十分に成立しうると判断できる。
今後の展望
本実証実験は、単なる技術的な検証に留まらず、3D都市モデルが持つビジネス上のポテンシャルを具体的に証明する、非常に有意義な機会となった。貨物・旅客という異なる事業領域の事業者から、運転者・指導者・管理者という多様な立場の被験者が参加し、それぞれの視点から本システムの有効性と事業性を多角的に評価したことで、その価値が特定の用途に限定されない、広範な市場性を持つことが示された。実証を通じて得られた主なポジティブな成果は、以下の通りである。
第一に、3D都市モデル活用の独自かつ高い実用価値を証明したことである。特に、実在都市の地理的文脈に即した危険シナリオ体験や、運転行動を客観的に可視化するリプレイ機能は、多くの被験者から「従来の架空都市を舞台としたシミュレータでは決して得られない価値」として高く評価された。これは、3D都市モデルが単なる背景データではなく、実践的な訓練効果を生み出すための核心的な要素であることを明確に示している。
第二に、本事業が持続可能な民間事業として成立する、高い市場性を確認できたことである。管理者層から強い投資意欲が示されたこと、そして多くの利用者が価格よりも訓練効果を重視し、高価格帯の「フル版」を希望したという事実は、本サービスが企業の具体的な課題解決に貢献し、十分な投資対効果を持つと認識された証左である。
さらに、今回の実証が今後の活用の広がりへの高いポテンシャルを示したことも大きな成果である。トラック、バス、タクシーという異なる業態の事業者のヒアリングから、立場を問わず、現実に即したドライブシミュレータのニーズが高いという結果を得られたことは、本ソリューションが特定の業界に限定されず、幅広い交通事業者へと水平展開できる可能性を示唆している。全国で整備が進む3D都市モデルを活用することで、日本各地の事業者の個別具体的なニーズに応えるビジネス展開が期待できる。
本実証で得られた貴重なフィードバックは、製品をさらに進化させるための道標となる。例えば、ハードウェアのセッティングを個々のドライバーや車種の特性に合わせてより最適化することで、訓練への没入感をさらに高めることができる。また、「夕暮れの西日」や「雨の日の夜間」といった、より多様な気象・交通環境下での危険シナリオを追加開発してほしい、といった具体的なご要望もいただいた。今後は、ソフトウェアアップデートや新たなコンテンツ開発を通じて、これらの要望を参考に、期待を超える価値を提供していく。
これらの成果を踏まえて製品価値を継続的に高めつつ、本プロジェクトは単なるシミュレータ提供にとどまらず、その普及によって蓄積される膨大な運転ビッグデータを活用し、運送業界全体の安全性をデータで支えるプラットフォームの構築を目指す。