3D都市モデルとBIMを活用したモビリティ自律運行システム
| 実施事業者 | 株式会社竹中工務店 / 株式会社センシンロボティクス / アダワープジャパン株式会社 / 株式会社アルモ |
|---|---|
| 実施場所 | 川崎市扇町地区 / 大阪市夢洲地区周辺 |
| 実施期間 | 2022年4月〜12月 |
3D都市モデルとBIMを統合したドローン及び無人搬送車両の自律運行システムを開発。空と陸の新たなモビリティサービスの実現を目指す。
実証実験の概要
都市部における建設工事では資材運搬等による交通渋滞が課題となっており、自律運航可能なドローンや無人搬送車両(AGV)の活用による解決が期待されている。一方で、ドローンではGPS測位のみの飛行では受信状況が悪いビルの間などでは正確で安全な飛行を担保できないことがある。さらに、ドローン・AGVともに運航に必要な地図情報として民間事業者が提供する3Dマップを利用せざるを得ず、精度担保やデータ連携、カバレッジ等の点で課題がある。
今回の実証実験では、これらの課題を解決し、資材運搬等を担うドローンやAGVの自律運行を可能とするため、LiDARやGPS等のセンサーと3D都市モデルを利用した自己位置測位を組み合わせた運航システムを開発する。
実現したい価値・目指す世界
都市部等が抱える交通サービス課題の一つとして、建設工事の資材運搬等による交通渋滞がある。これらは工事の遅延を引き起こすだけでなく近隣住民の生活や都市機能への影響も大きい。
今回の実証実験では、この課題解決に資する空と陸の新たなモビリティ運航システムとして、ROS等のオープンソースのモビリティ用ソフトウェアを活用し、3D都市モデルとBIMを統合した地図データをマップとして、ドローン自律飛行および無人搬送車両(AGV)自律走行を可能とするシステムを開発する。さらに、このシステムは、輸送におけるもう一つの課題である建設現場への「ラストワンマイル」へのアプローチを可能とするため、屋外/屋内をシームレスに利用可能なものとする。
将来的には、3D都市モデルとBIMモデルを統合したモビリティのオペレーションシステムを開発することで、GPSが入りにくい環境下である都市部や屋外・屋内のシームレスな自律運行や、有人地帯でのドローンの正確で安全な目視外飛行を目指す。

検証や実証に用いた方法・データ・技術・機材
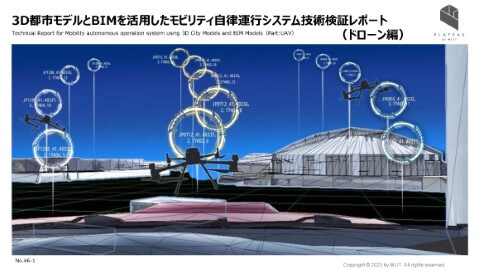
■ドローンの自律飛行
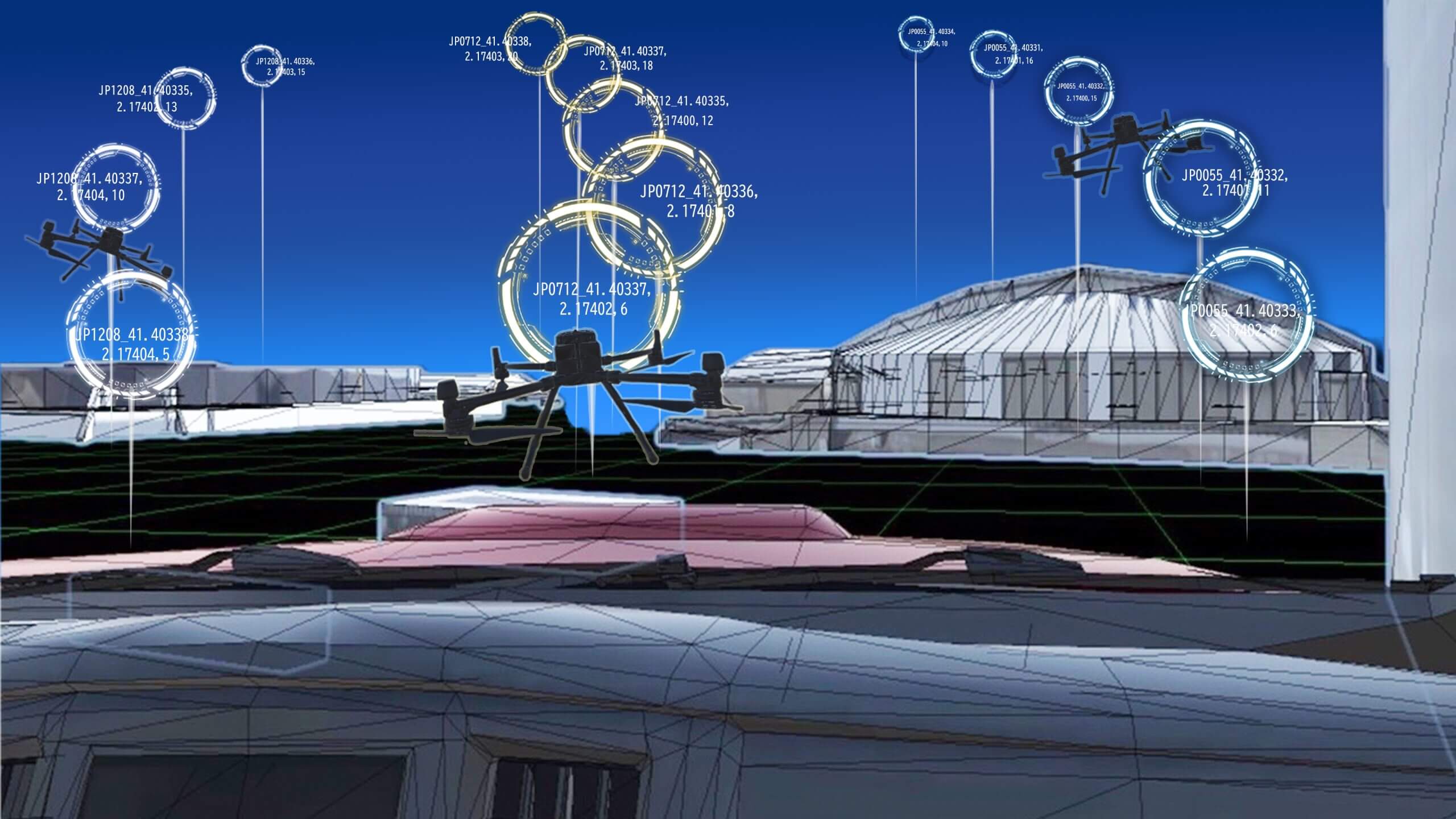
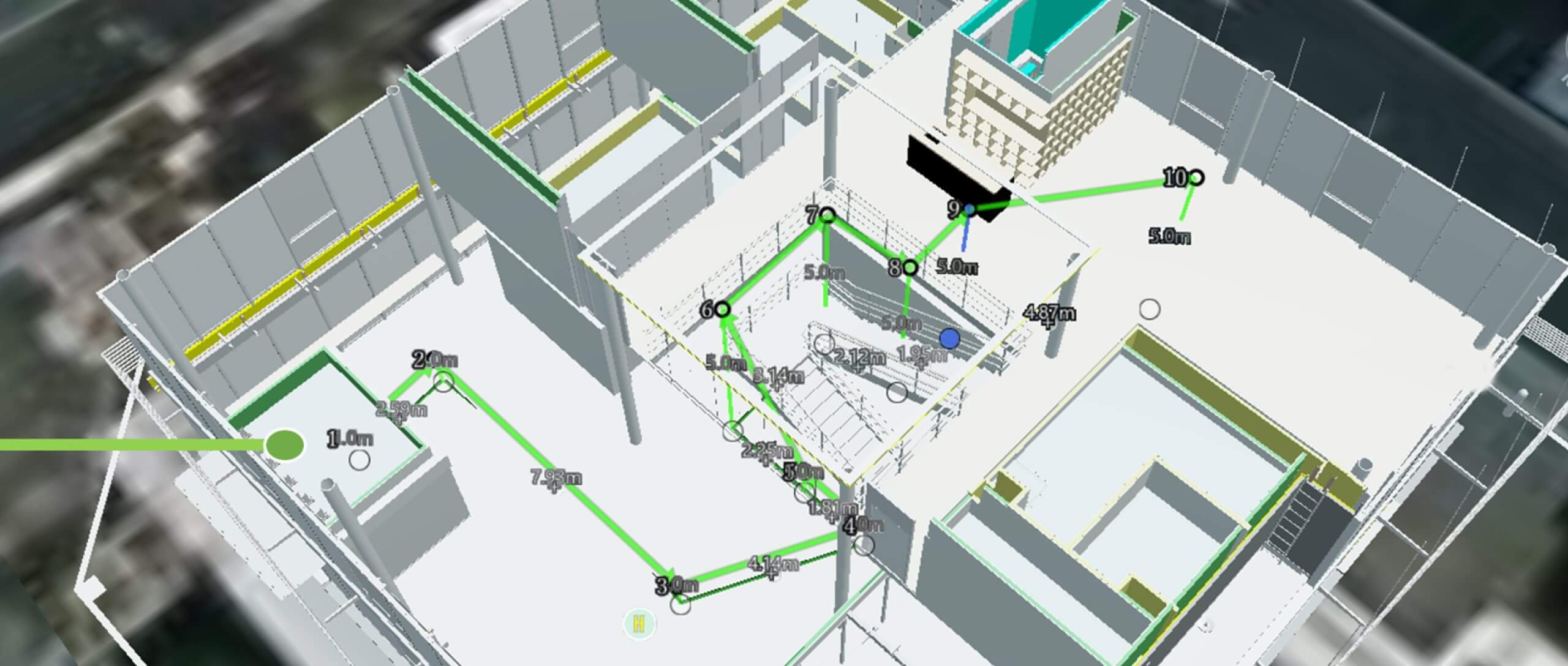
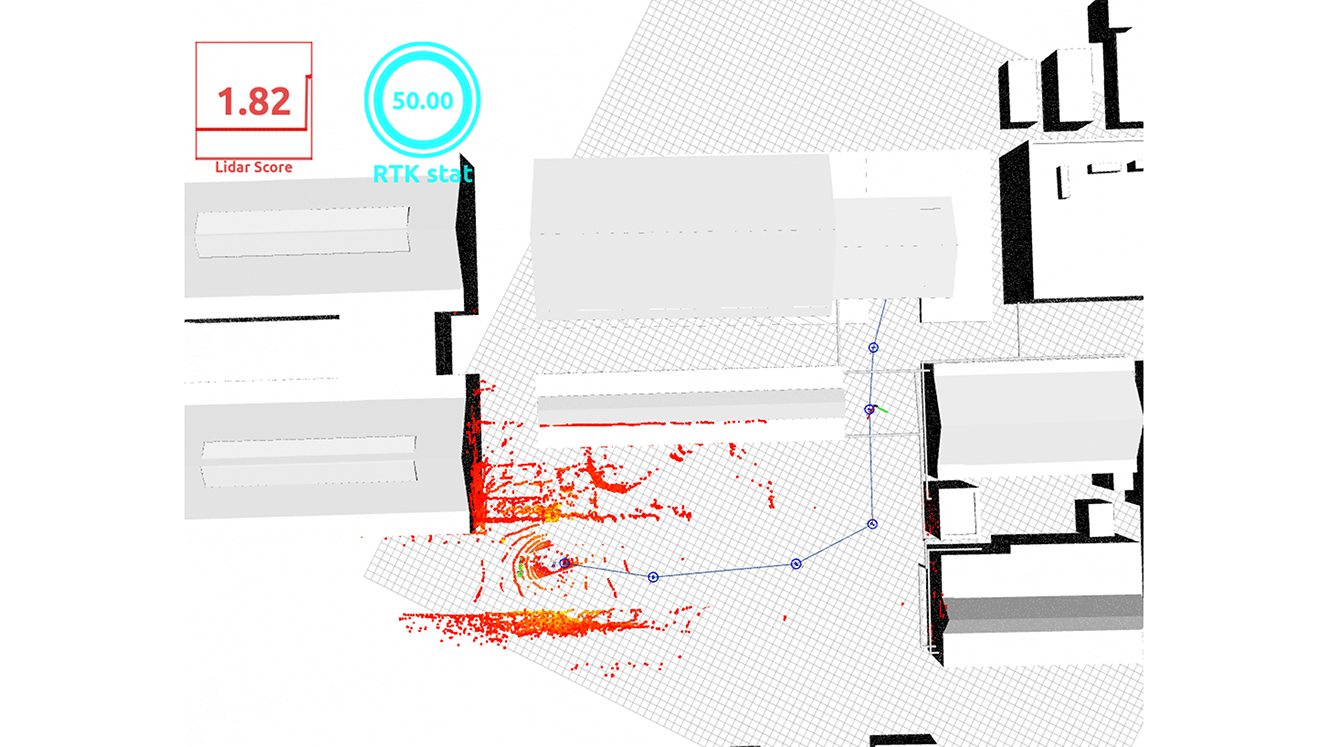
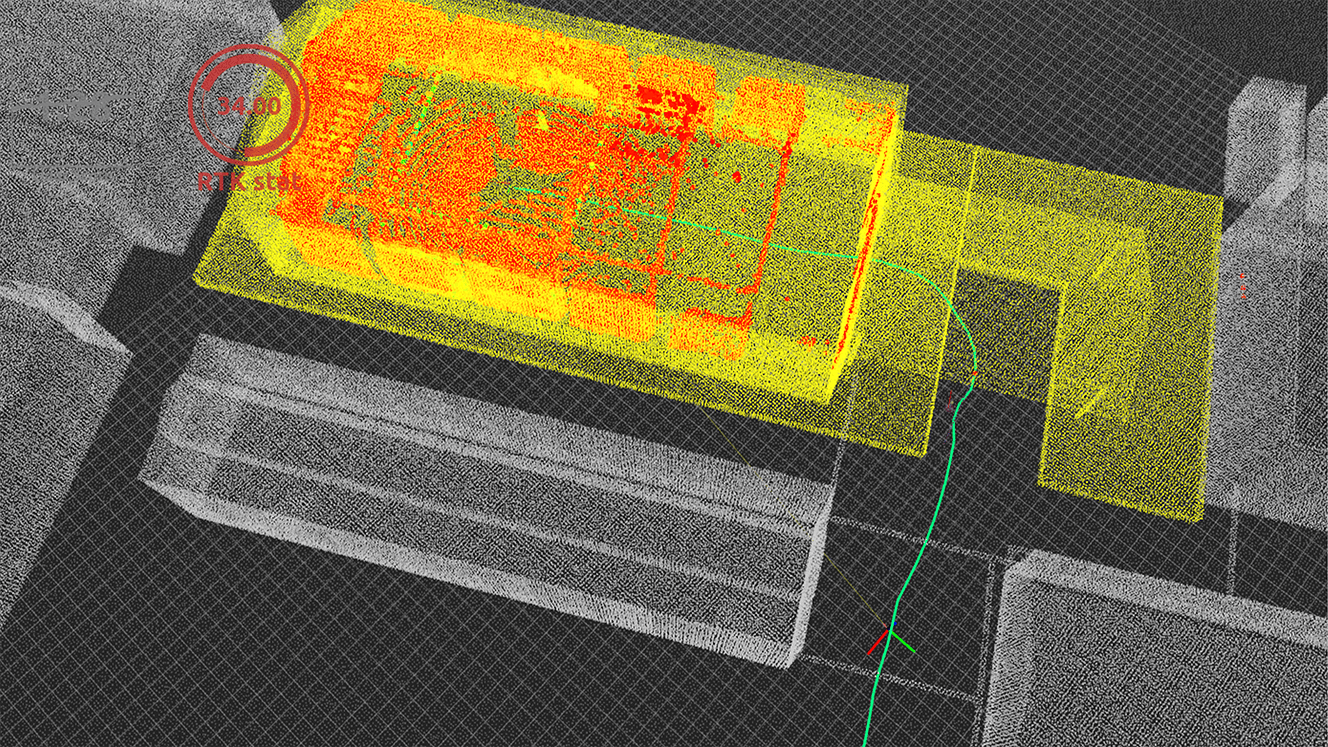
ドローンの自律飛行では、屋外は3D都市モデル(建築物モデルLOD2)、屋内はBIMモデルの形状を活用してLiDARとGNSS(衛星測位システム)による自己位置推定を行うドローン自律飛行システムを、ロボット・アプリケーションの作成支援ライブラリ・ツール群であるROSを利用して構築した。具体的には3D都市モデル・BIMモデルをマップとして利用するLiDARによる自己位置測位(LiDAR SLAM)を行う仕組みをフルスクラッチで開発するとともに、LiDAR SLAMとGNSSの2つの測位情報を状況に応じて統合又は切り替える「FUSION」と呼ばれるシステムを構築した。具体的には、測位状態の良好な状態(数㎝の精度が期待される状態)を閾値として設定し、双方ともに有効な場合は測位結果を統合し、一方の精度が期待できない場合にはもう一方のみに切り替えることで、精度向上と冗長性を図る仕組み(FUSION)を開発した。また、3D都市モデル(建築物モデルLOD2)とBIMモデルという形式の異なる2つのモデルを同一のマップに表示するために、それぞれのモデルに原点座標を持たせて統合し、PCL(Point Cloud Library)を使って点群マップ化する方法を構築した。
検証は、飛行スタートからゴールまでの間に複数のウェイポイントを設定し、屋外の3D都市モデルを利用した飛行から屋内のBIMを利用した飛行を連続的に行うコの字型の飛行ルートを作成し、飛行精度を評価した。
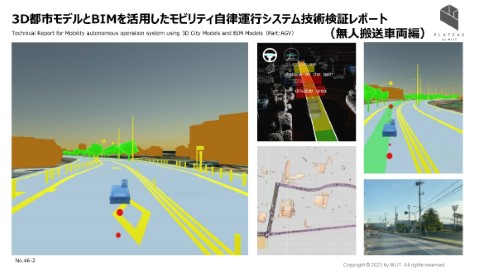
■無人搬送車両(AGV)の自律走行
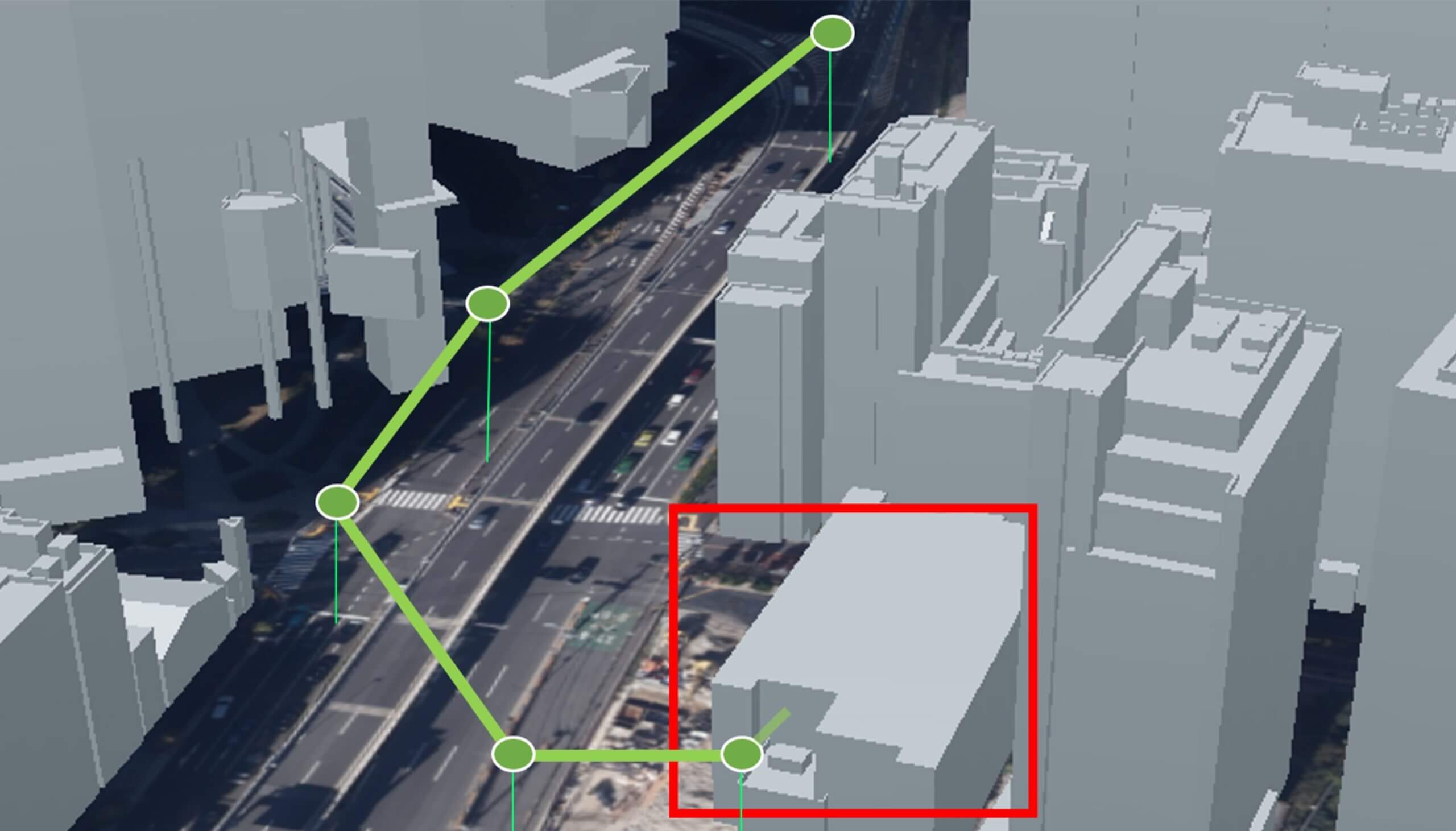
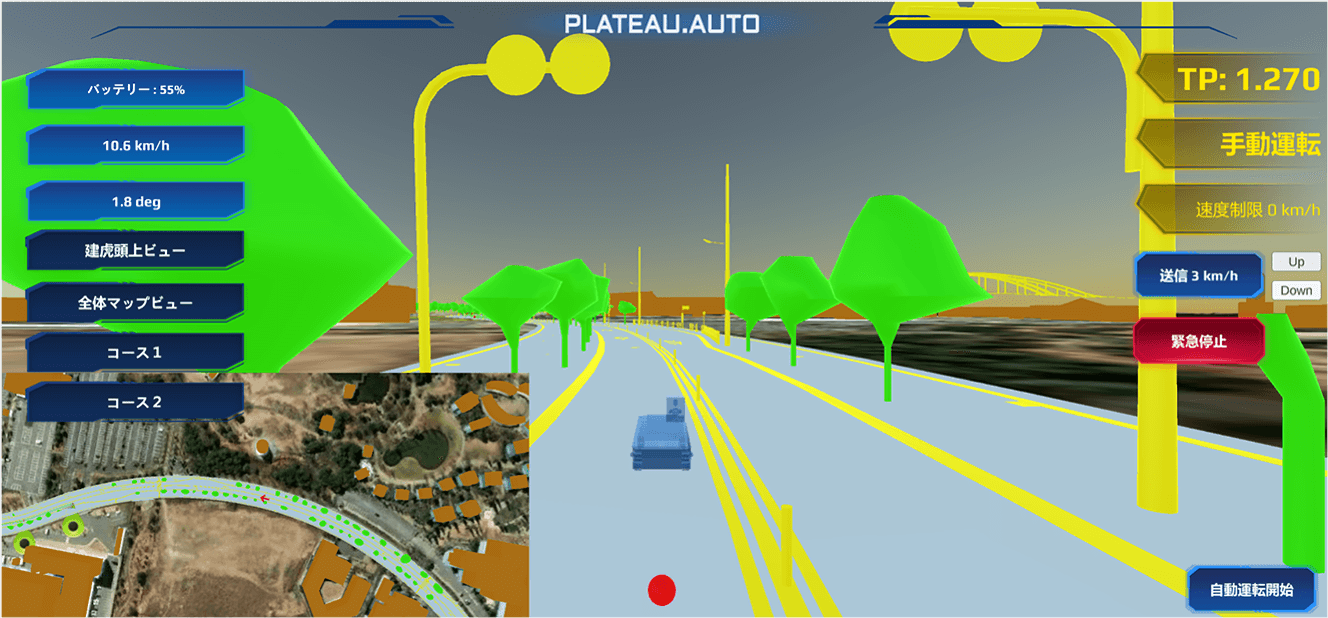
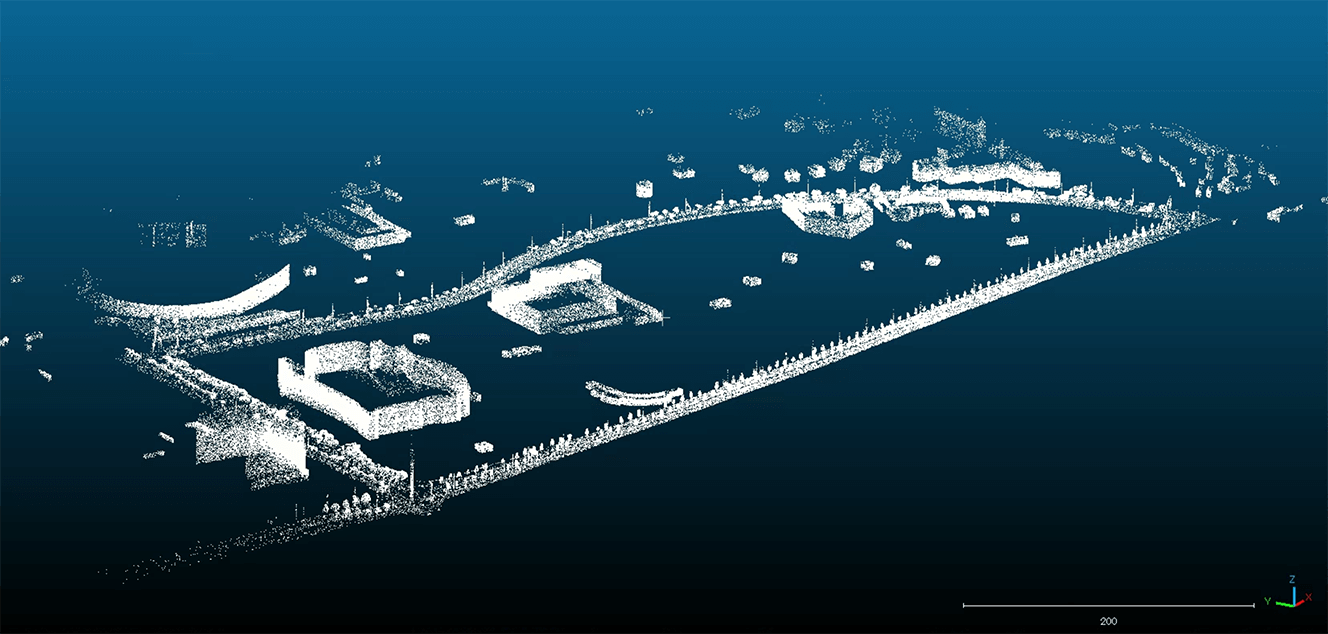
無人搬送車両(AGV)自律走行では、建築資材運搬のための自動搬送車両(最大積載量4トン、最大速度15km/h)を製作するとともに、3D都市モデル(建築物モデルLOD2、道路モデルLOD3、都市設備モデルLOD3、植生モデルLOD3)から生成した点群マップとLiDARセンサーにてエッジ側で取得された点群とをマッチングさせることで、自己位置推定を行うAutoware(自動運転システム用オープンソースソフトウェア)を活用した自律走行システムを構築した。また、自動搬送車両の運行をモニタリングするため、3D都市モデルを配置した仮想空間をUnity上で構築し、リアルタイムの車両の自己位置推定結果をプロットするデジタルツインビューワーを開発した。このビューワーでは、自動搬送車両のコントロールや車載カメラのモニタリングなども可能となっている。
自律走行に必要な点群マップは、Unity上の仮想空間に3D都市モデルを配置し、この空間上で仮想LiDARセンサーを搭載した仮想車両を走行させることによって取得した。この点群マップと、実際の現場を走行させてLiDARセンサーから取得した点群マップの2パターンを用意し、精度の比較に用いた。自己位置推定にはエッジ側で取得したリアルタイムのLiDARセンサーの点群データと、あらかじめ生成した点群マップの分布をマッチングさせるNDT(Normal Distributions Transform)スキャンマッチングと呼ばれる手法を利用した。

検証で得られたデータ・結果・課題
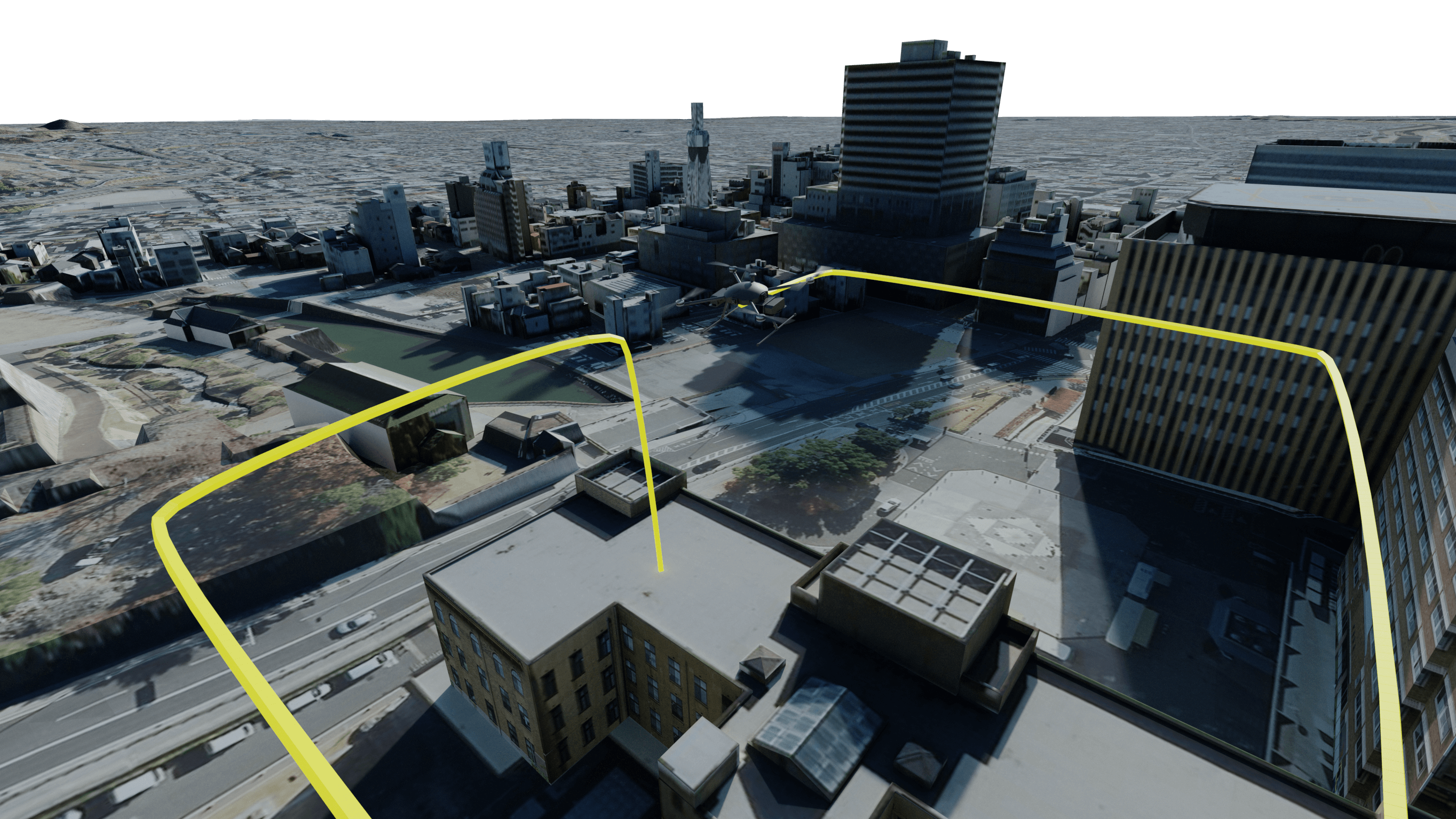
■ドローンの自律飛行
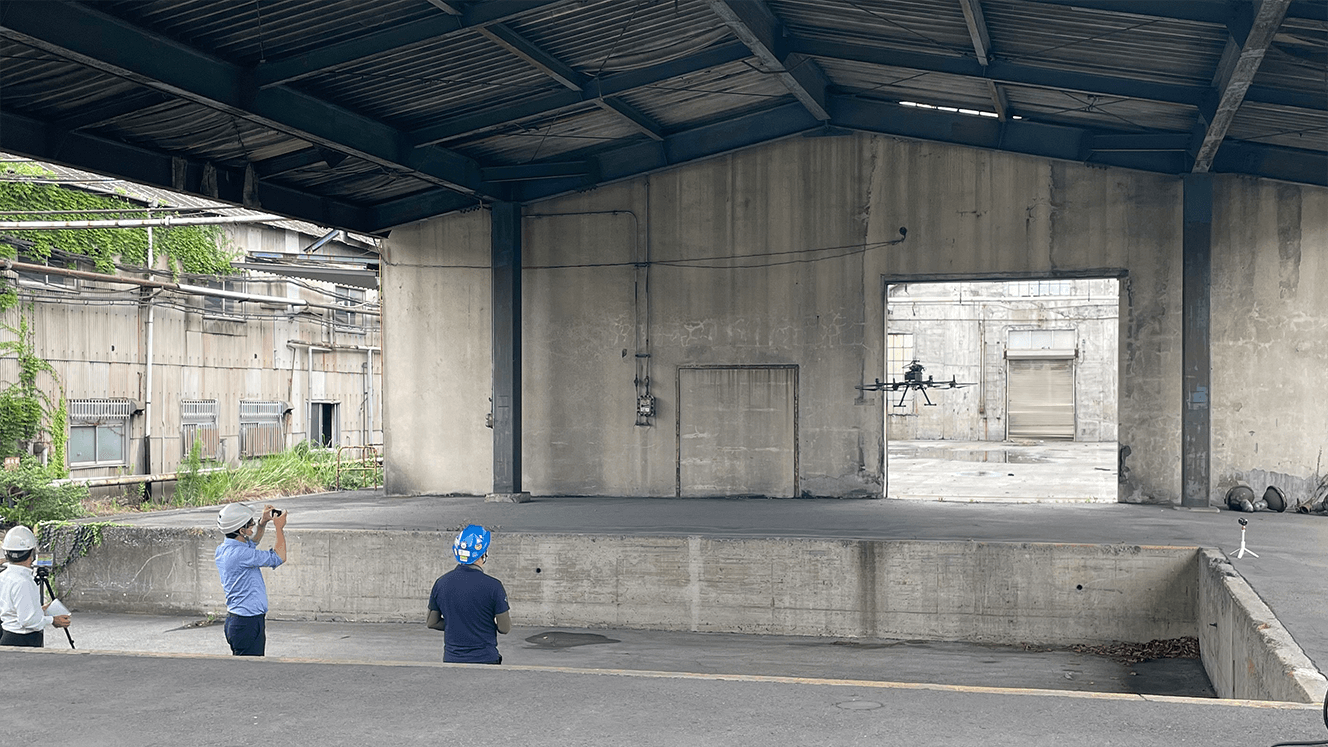
ドローンの自律飛行の実証実験では川崎市扇町地区にて建物およびその周辺部での自律飛行を行った。3D都市モデル(LOD2)とBIMモデルを活用することで、屋外から屋内までシームレスに自律飛行することができた。飛行精度は、ドローン本体下部に設置したカメラから地上のウェイポイントに設置したマーカーを読み取り確認する方法を用いて計測し、計測地点におけるドローンの位置座標誤差として、平均1cm、最大10cmが得られ、高精度な飛行ができていることを確認した。
一方で、自律飛行中にドローンが捉えた自己位置情報などを地上のPCに送信する際に、上空利用のLTEを使用した場合、LTE回線速度が遅いためデータ送信の遅延が発生し、リアルタイムにドローンの位置を把握することが難しいことがわかった。また、今回の検証の飛行速度は0.5m/sと人の歩行速度より遅く実用的な速度には至っておらず、これ以上の速度向上は精度担保が難しいことも課題としてあげられる。飛行高度の面では、高度が建物高さを超えると、周囲のマッチング対象が減ることから精度の低下が課題となる。
■無人搬送車両(AGV)の自律走行
無人搬送車両(AGV)自律走行の実証実験では、大阪市舞洲地区の公道で自律走行を行い、デジタルツインビューワーを用いたモニタリングを行った。結果として、3D都市モデルのみから作成した点群マップで自己位置推定を行い、自律走行が可能であることを確認できた。特に、道路の両脇に特徴のある建物がある場合、あるいは建物が周りになくとも植樹・道路標識がある場合に自己位置推定の精度が向上することが確認できた。
一方で、実世界と3D都市モデルが乖離してしまっている場合(駐車場にある植え込み、立ち入り禁止のためのフェンス、スタジアムの柱が3D都市モデルにはない等)に自己位置推定の精度が下がり、自律走行が難しいことも明らかとなった。また、実世界と3D都市モデルの乖離がない場合でも、15km/hを超える走行速度帯におけるマッチングの精度及びスピードに課題があることが分かった。樹・道路標識がある場合に自己位置推定の精度が向上することが確認できた。
今後の展望
都市部におけるドローンや車両等の自律運航では、高層ビル等の影響でGNSS測位の精度が低下する状況が発生し、正確かつ安全な飛行・走行ができないことが多々ある。また、LiDARによるSLAMはGNSSに頼らない自己位置推定の仕組みとして有効だが、事前のマップ作成や調整などが必要となり、コストの点で課題がある。これらの課題解決に資する新たな技術として、本システムでは、LiDARと3D都市モデル・BIMモデルを組み合わせた自己位置推定の仕組みを構築した。さらなる実用化に向けては、今回の実証実験で抽出した課題を迅速に解決し、効率面と安全面において大きく高めた運搬システムサービスを新しく生み出すとともに、汎用性の高い本システムをその他のサービスへ横展開していくことも志向したい。
ドローンについては、実用的な飛行速度・飛行高度を担保するため、より高速な動作が可能なシステム・センサーの導入による速度向上を検討していくとともに、特徴点の多い、より精緻なBIMモデルと3D都市モデルを組み合わせたマッチング精度向上の手法を構築し、GNSS測位が不安定な高層ビルに囲まれた都市部における自己位置推定の実用化を目指す。
無人搬送車両については、3D都市モデルのみから作成した点群マップを利用した自己位置推定精度の向上を図る必要がある。点群マップの精度、建物の密集度、車両速度などがマッチングの課題となっていることから、仮想LiDAR及び仮想車両の精緻化、建物が多いエリアでの自己位置推定の精度の検証、速度を上げた場合(15km/h)の自己位置推定の精度検証などを行い、自律走行に必要な点群マップ生成にかかるコストを下げつつ、自動運転の普及に資する基盤構築を目指す。
Technical Report