3D都市モデルとBIMを活用したモビリティ自律運航システム v3.0
| 実施事業者 | 株式会社竹中工務店 / 株式会社センシンロボティクス / アダワープジャパン株式会社 |
|---|---|
| 実施場所 | 大阪府大阪市夢洲地区 |
| 実施期間 | 2024年11月〜12月 |

3D都市モデルとBIMの統合マップを利用した、ドローンと自動搬送車両の双方に対応した運行管理システムを開発。水平・垂直移動を統合した無人モビリティサービスの社会実装を目指す。
本プロジェクトの概要
都市部の物流において、建設現場の資材運搬をはじめ、「ラストワンマイル」輸送を効率化することの難しさが課題として挙げられている。本課題解決のために自動搬送車両や自律運航型ドローンを活用する方法が研究されているが、都市部におけるGPS位置測位の不安定性や、SLAM技術の導入コストの高さや精度不足など、都市部における正確かつ安全な無人ロボット自律運航実現のための課題は多い。
本プロジェクトでは、2023年度の「3D都市モデルとBIMを活用したモビリティ自律運航システム(ドローン)v2.0」、「3D都市モデルとBIMを活用したモビリティ自律運航システム(車両)v2.0」を基礎とし、車両自己位置測位機能の強化および車両の自動運航計画立案およびオペレーションが可能になるようドローン用GCSアプリ*1「SENSYN CORE Pilot」に、改修を加え、水平・垂直方向のラストワンマイル輸送に必要なシステムを実現する。
*1 Ground Control System:無人航空機を人間が制御するためのシステム
実現したい価値・目指す世界
都市部の物流においては、建設工事の資材運搬によって発生する交通渋滞の問題や、様々な大きさ・重量の資材を水平・垂直方向へ移動させる「ラストワンマイル」を効率化することの難しさが課題として挙げられている。これらの課題は、工事自体の遅延を引き起こすだけではなく、対象区画で通行止めの必要を生じさせるなど、近隣住民の生活や都市機能にも影響を及ぼす。
このため、自動搬送車両や自律運航型ドローンを資材運搬等に活用する方法が研究されているが、GPSによる位置測位の不安定性や、SLAMによる地図作成技術のコストの高さや精度の不足など、都市部における正確で安全な自律運航の実現には課題が多い。
そこで、2022年度の「3D都市モデルとBIMを活用したモビリティ自律運行システム」および2023年度の「3D都市モデルとBIMを活用したモビリティ自律運航システム(ドローン)v2.0」「3D都市モデルとBIMを活用したモビリティ自律運航システム(車両)v2.0」では、車両とドローンそれぞれにおいて以下の開発を行った。
車両においては、仮想車両を仮想空間内で走行させ、マップを作成するシステムを構築した。具体的には、3D都市モデルをベースとした仮想空間内の経路設定に始まり、車両の走行、走行経路の点群データを収集、収集したデータから広範囲の点群マップ作成に至る。このマップを用いて、現実空間で自己位置測位の検証を行った。結果、既存の3D都市モデルを元に十分な特徴点を捉えることのできるエリアであれば、基準値を上回る高精度な測位が可能であることが明らかとなった。
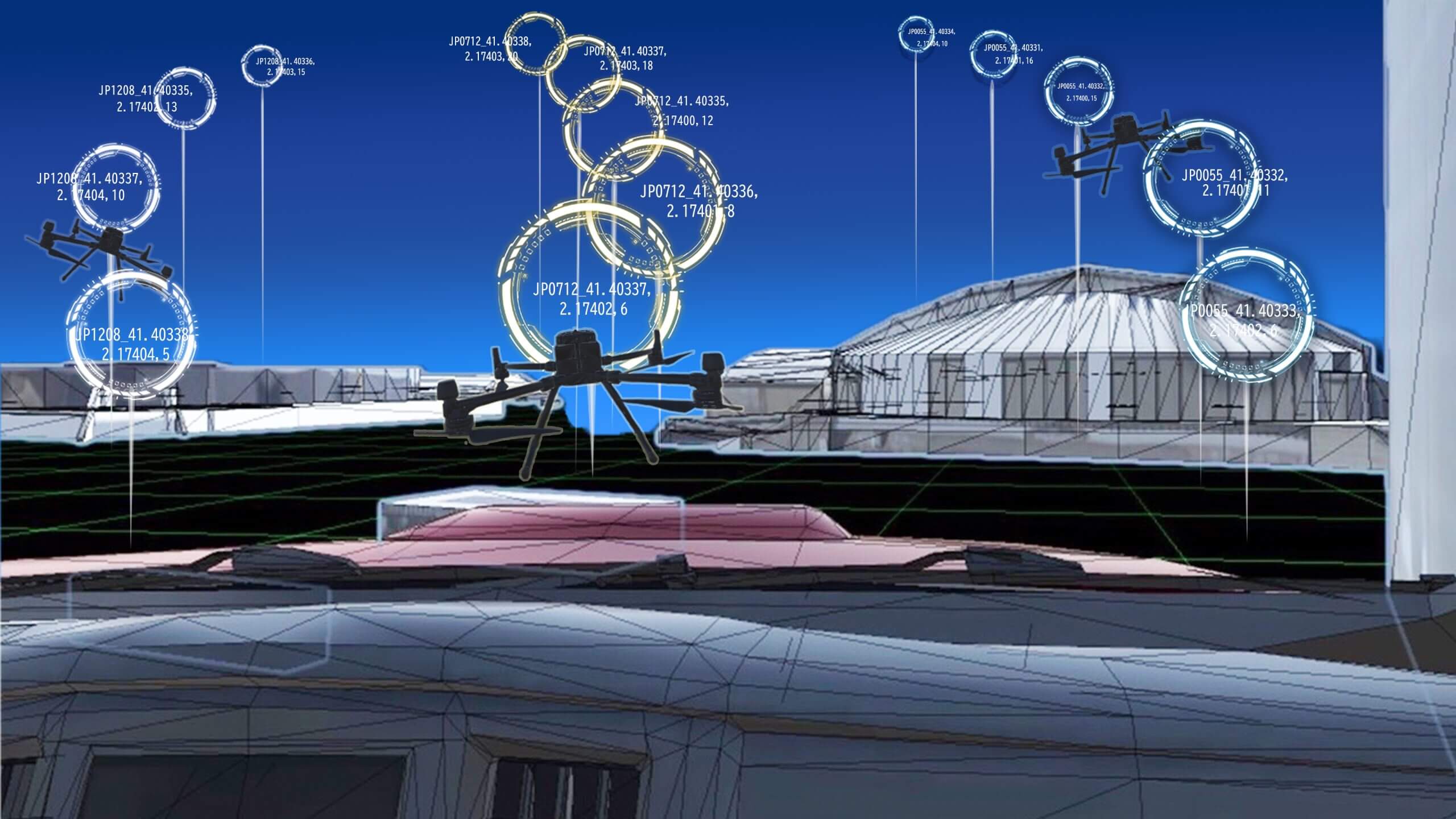
ドローンにおいては、3D都市モデルとBIMを統合し点群化した統合マップを用いたLiDAR自己位置推定、GPS測位、およびビジュアルイナーシャルオドメトリ(連続的に取得されたカメラ画像の変化を捉えることでドローンの移動量を算出する技術)を用いた自己位置推定システムの結果を統合することで、従来に比べ低コストな点群マップの作成と高精度な飛行を行う、屋内外をシームレスに結ぶドローンの自律運航システムを開発し、高さ70m・飛行距離237.9mの自律運航に成功した。
他方、自動搬送車両やドローンといった個々のモビリティの自動運航技術を開発したものの、ラストワンマイル輸送を実現するための水平・垂直輸送を統合した自律運航システムの開発には至っておらず、社会実装に向けた課題を残した。
本プロジェクトでは、過去の取組アセットを基礎として開発したシステムに改修を加える。具体的には、RTK測位データを活用し、車両の自己位置推定機能の改修を行う。また、ドローンだけではなく自動搬送車両の運航管理/モニタリングが可能になるようドローン用GCSアプリ「SENSYN CORE Pilot」に改修を加え、都市部における道路やビル間などの屋外空間、建築物の屋内空間、建築物に沿った垂直空間など、特徴の異なる空間をシームレスに移動するラストワンマイル輸送を行うための仕組みを構築する。
これにより、専門的な知識を持たない作業者でも利用可能かつ、高精度で安定的な車両・ドローンの自律運航管理/モニタリングシステムを実現し、新たなモビリティサービスとしての自動搬送車両およびドローンの社会実装を目指す。

検証や実証に用いた方法・データ・技術・機材
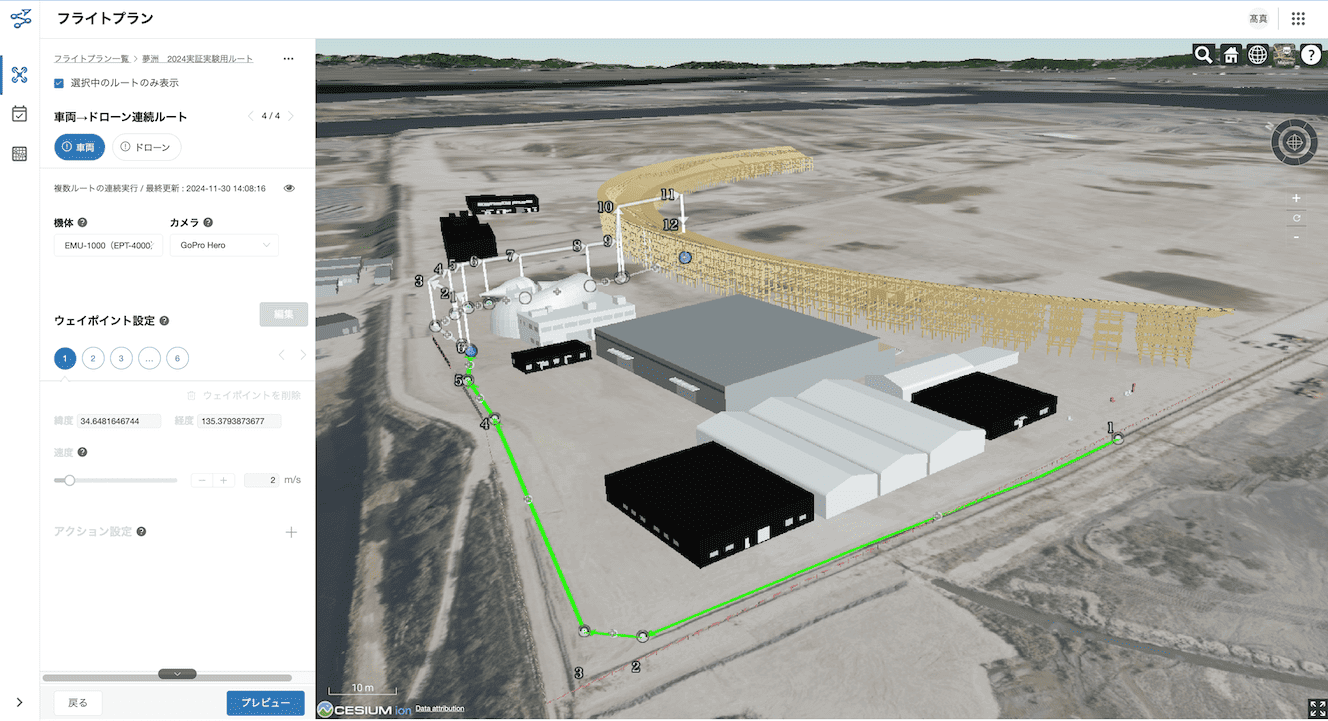
本プロジェクトでは、建設現場における建築資材のラストワンマイル輸送の効率化を目指し、ドローンと自動搬送車両の双方に対応した自動運航システムを開発した。基盤システムとしては国内で開発されたブラウザベースのドローン用GCSアプリ「SENSYN CORE Pilot」を選定し、「SENSYN CORE Pilot」に改修を加えることで、同一システム上でドローンおよび車両のルート作成およびモニタリングできる環境を構築した。また、車両の自己位置推定精度を向上させるため、自動搬送車両にRTK-GNSS測位デバイスを搭載し、従来の点群マップを用いた自己位置推定と組み合わせた新たな自己位置推定アルゴリズムを開発した。
「SENSYN CORE Pilot」は、ドローンの飛行ルートの設定と、飛行中のドローン位置の表示や飛行指示を行うためのオペレーティングツールであり、直感的なドローン運航を目的として利用している。本システムはこれまでに、自己位置推定システムから取得した自己位置測位情報を「SENSYN CORE Pilot」上でリアルタイムに表示しオペレーターの飛行操作を支援するため、地形データ切替え機能、PLATEAU-Terrain対応機能、ROSメッセージ双方向変換機能、非常停止機能を開発・搭載した。「SENSYN CORE Pilot」とドローンの双方向の通信システムを確立している。
Autowareは、自動搬送車両の開発と運用を支援するためのオペレーションシステムであり、スムーズな自動運転の実現を目指して利用されている。本システムは、車両のセンサーから取得したデータをリアルタイムに処理・表示し、オペレーターの運行操作を支援する機能を備えている。具体的には、自己位置推定機能、障害物検知と回避機能、経路計画アルゴリズム、ROSメッセージ双方向変換機能、緊急停止機能が開発・搭載されている。
本プロジェクトではドローンと車両を同一システムで運航管理するためのUIを新たに開発した。また、本来ドローンの自律運航/モニタリングシステムである「SENSYN CORE Pilot」と、車両の自動運行オペレーティングシステムであるAutowareの間で情報を双方向にやり取りするため、MQTT*2を活用してAutowareからの情報を適切な形式に変換する仕組みを構築した。これにより、双方のシステム間でデータの受け渡しが可能となり、SENSYN CORE Pilot上で車両・ドローンのテレメトリ情報や、自律運航の開始や完了の確認が可能となった。
*2 MQTT(Message Queuing Telemetry Transport):IoT向けの軽量なメッセージングプロトコル
次に、車両の自己位置推定精度向上のため、Autowareの自己位置推定機能に、RTK-GNSS測位のデータを取り込み、従来の点群マッチングの自己位置推定精度が低下した場合にRTK-GNSS測位の自己位置に置き換えるロジックを新たに追加した。具体的には、自動搬送車両のハードウェア構成として、電子制御可能な4トン電動トラックにソフトバンク社製のRTK-GNSS測位デバイス「ichimill」とOuster社製のLiDAR「OS-1-64」、自己位置測位のソフトウェアを実行するPCはSystem76社製「kudo」を使用し、「ichimill」から取り込んだNMEA形式のデータをLiDAR「OS-1-64」から取得した点群データと併用した。従来は点群データを活用した自己位置推定のみ行っていたが、これに加えて、点群データによる自己位置推定精度(点群マッチングの相関値)が一定の基準を下回った場合に、RTK-GNSS測位で自己位置推定を補うことで精度向上を図った。
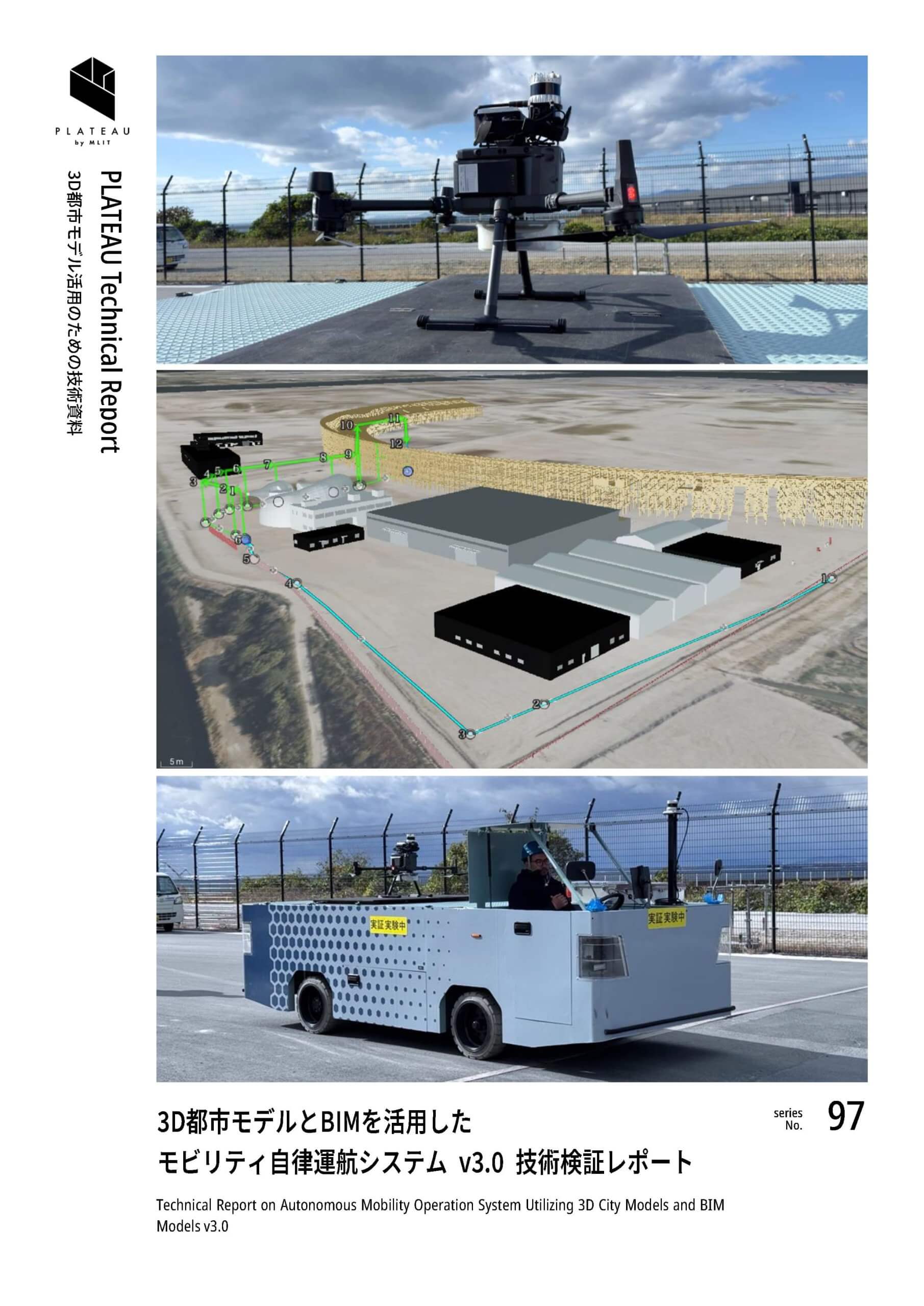
ドローンのハードウェア構成としては、2023年度の「3D都市モデルとBIMを活用したモビリティ自律運航システム(ドローン)v2.0」同様、DJI社製「DJI Matrice 300 RTK」をベースとした独自機体を使用した。
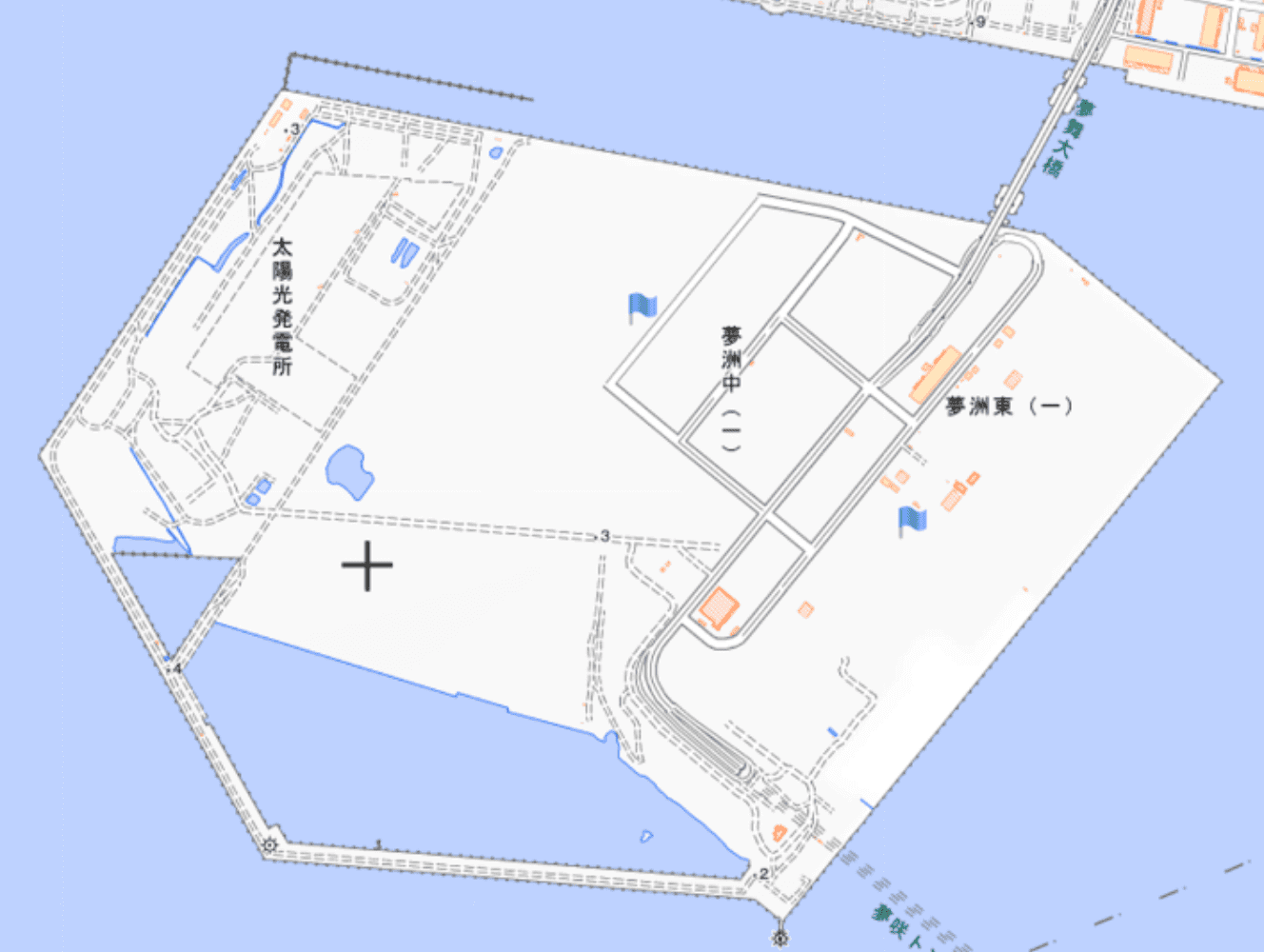
実証エリアとしては、大阪府大阪市夢洲地区の施設整備事業(PW西工区)の工事現場を選定した。自律運航に必要な3Dマップ生成のため、3D都市モデルの建築物モデル(LOD3)および都市設備モデル(LOD3)をベースに一部建築物のBIMモデルを変換して得られた建築物モデル(LOD4)をマージすることで、一つのCityGMLファイルを生成した。次に、ドローン用の点群マップについては、Trimeshライブラリを用いてこのCityGMLファイルの表面をサンプリングすることで生成し、自動搬送車両用の点群マップとしては、PLATEAU PCL Generator経由で生成された点群マップ「PCLGマップ」を利用した。
本システムの検証として、ドローン・車両のルート作成・運航管理の有用性、車両の自己位置推定精度を検証した。
検証で得られたデータ・結果・課題
本システムを用いて、大阪府大阪市夢洲地区の施設整備事業(PW西工区)の工事現場内にて車両・ドローンによる水平・垂直方向の自動運航を行うことで、ルート作成・運航管理におけるGCSアプリ「SENSYN CORE Pilot」の有用性の検証と、RTK-GNSS測位を取り入れたことによる車両の自己位置推定精度の向上を検証した。SENSYN CORE Pilotの利用者として、実際のルート作成や飛行オペレーション業務を実施する事業者を選定し、有用性についてヒアリングした。
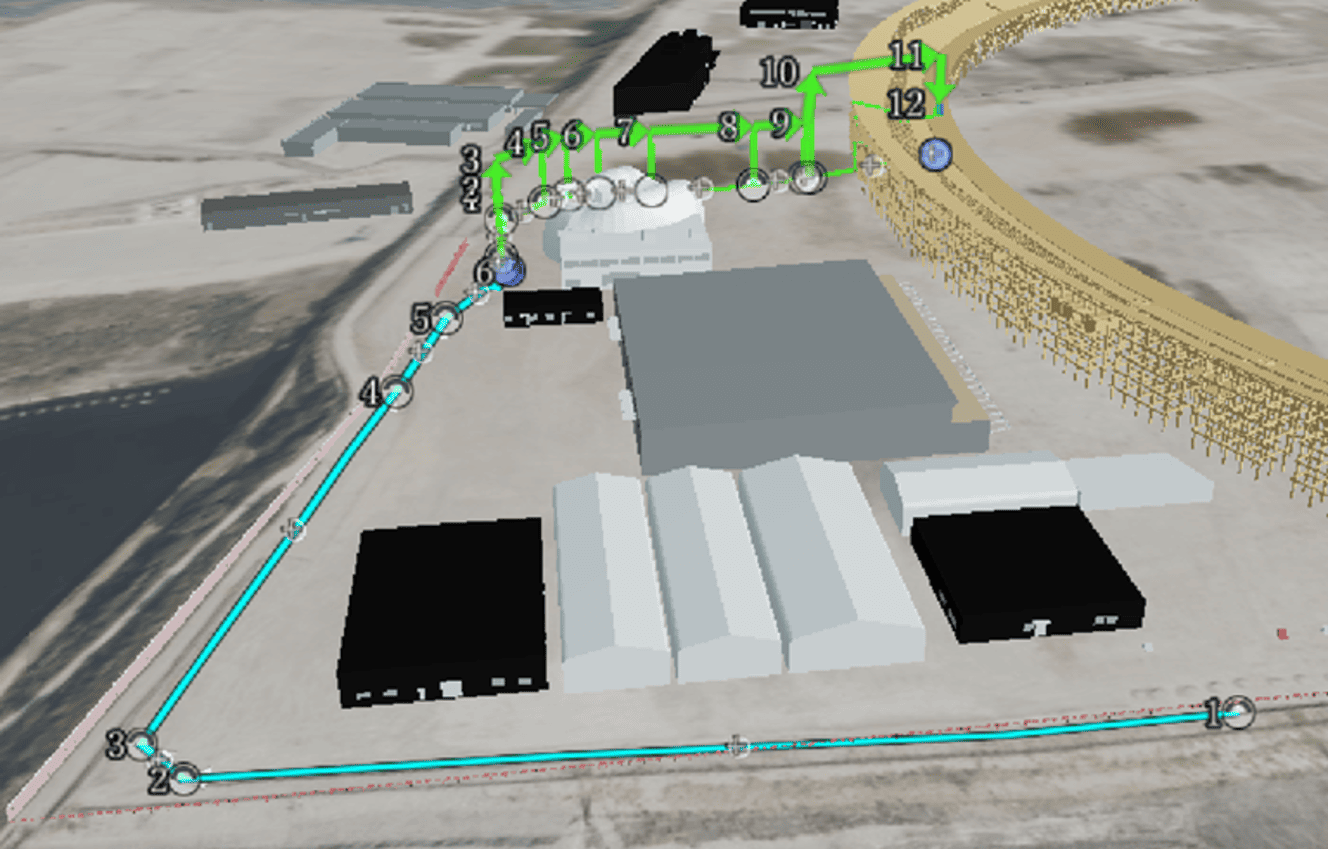
ドローン・車両を統合した自動運航システムの検証では、自動搬送車両が工事現場南側道路の大屋根(以下、リングという)手前から走行を開始し、直進した後右折、ドローン離陸地点までの約350mの経路を走った(図中水色の経路)。走行完了後は、車両の荷台からドローンが離陸し、離陸地点とリングの間の側道上空を飛行しながら、リングの手前で一時停止、30mまで上昇した後、リングに着陸する約200mの経路を飛行した(図中緑色の経路)。さらには、物流分野での実用化を見据えて、最大500g程度の小型物品をドローンに積載した状態で同ルートの自動運航が可能か検証した。気象条件として、天候:晴れもしくは曇り、風速:5m以下を設定し、これに則った環境で検証を行った。
検証の結果、自動搬送車両の走行開始からドローンの離陸・着陸までの水平・垂直方向の自動運航、および小型物品を積載した状態での自律運航を達成できた。この結果から、本実証時の条件下において、ラストワンマイル輸送を目的とした車両・ドローンの自動運航は、本システムを用いることで実現可能であるということが示された。

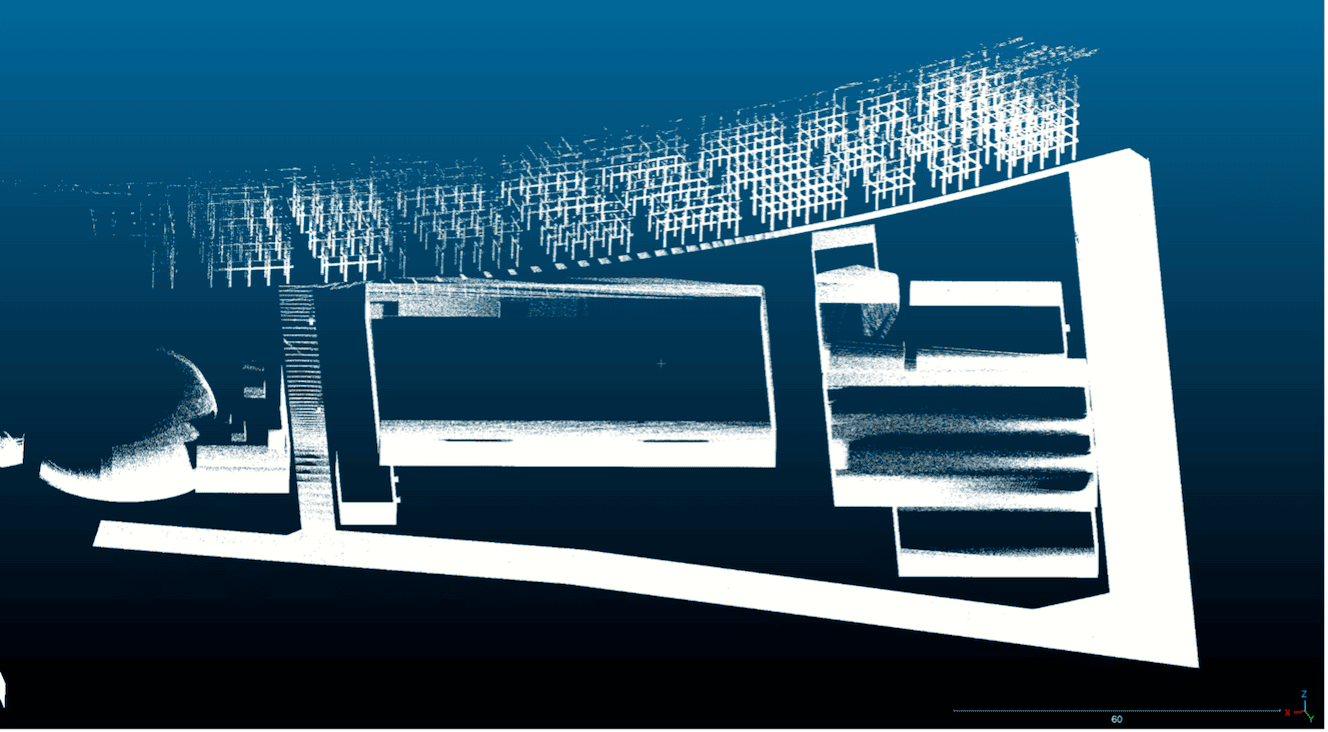
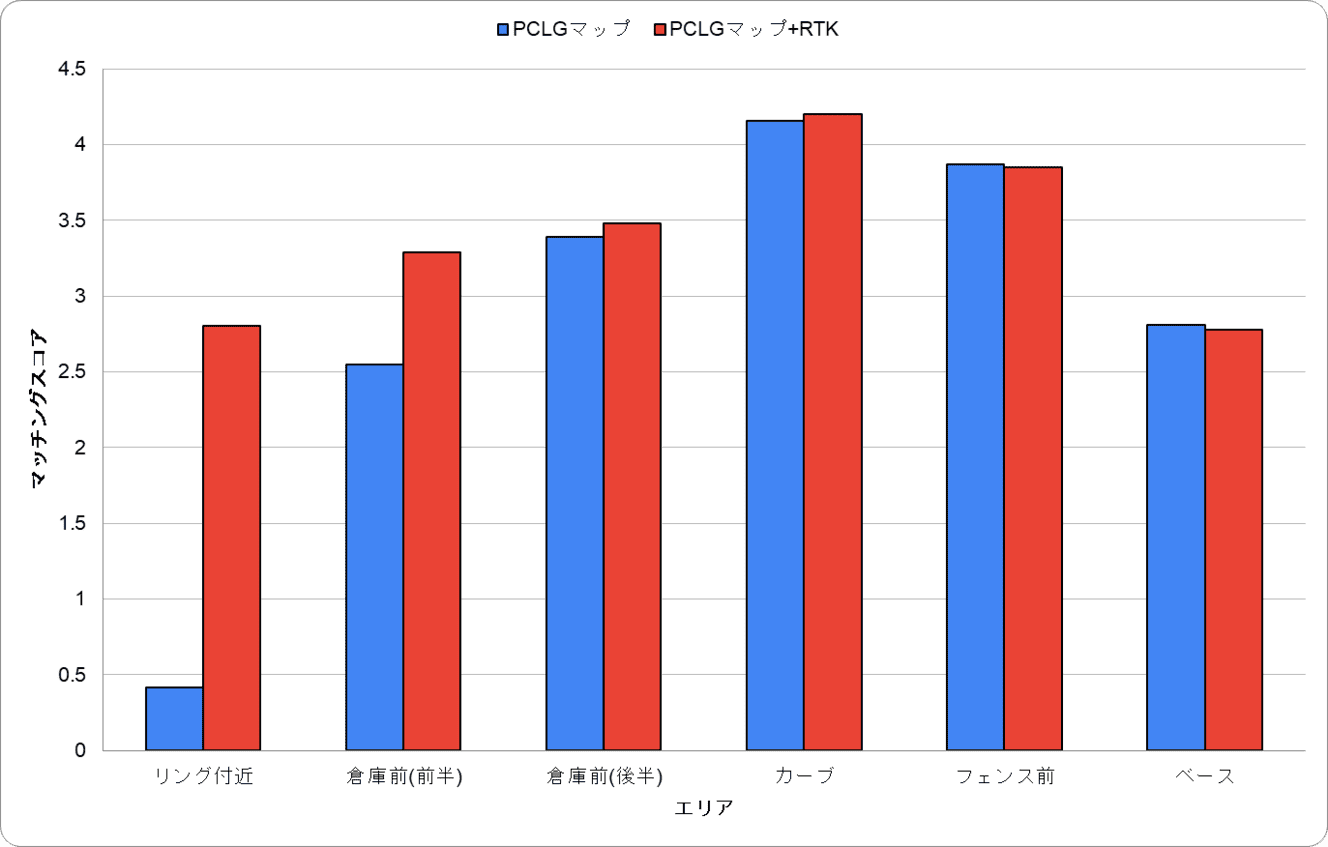
車両の自己位置推定精度の検証は、自動搬送車両が走行するルート内で点群マッチングの精度が低下した際に、RTK-GNSS測位による補完を行い、補完処理の有無による精度比較を実施した。点群マッチング精度は、車両の走行によって取得した点群マップ「リアルマップ」と、PLATEAU PCL Generator経由で生成された点群マップ「PCLGマップ」をパターンマッチングし、一致度から算出する。PLATEAU PCL Generatorは、3D都市モデルを配置した仮想空間上でLiDARを搭載した車両を走行させ、LiDARの点群放射をシミュレートすることで点群マップを出力するシステムである。検証においては、走行ルートを6つのエリアに分割し、3D都市モデルが左右両側に整備されている「両側整備エリア」と片側しか整備されていない「片側整備エリア」に分類し、それぞれのエリアでどの程度RTK-GNSS測位による補完に優位性があるか測定した。検証前の段階では、点群マッチングの対象面積が減ることから「片側整備エリア」において優位性が高いと予測した。
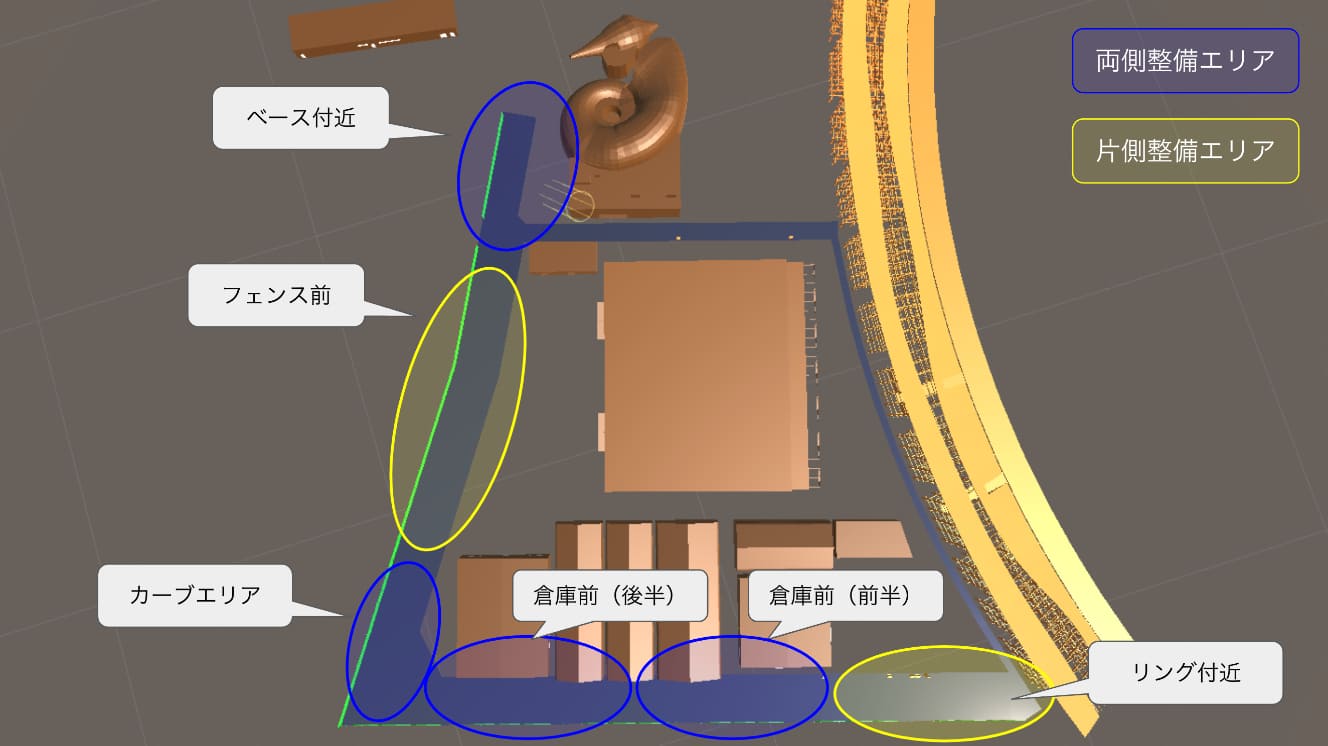
検証の結果、6つの内2つのエリアではRTK-GNSS測位によって補完された自己位置推定精度が点群マッチングの精度を大きく上回った。RTK測位優位度*3はそれぞれ、3D都市モデル整備時点からの工事進捗などでPCLGマップと現実の建築物に大きな差異が発生した箇所を含むエリアでは673%、同じ形状の施設が並び自己位置をロストしやすい箇所を含むエリアでは129%と、RTK-GNSS測位の優位性が顕著に現れた。一方で、当初RTK-GNSS測位の優位性が高いと想定した「片側整備エリア」では優位性を示す結果が得られなかった。これは、片側整備エリアであってもフェンスなどの都市設備モデルの特徴点が多く取得できたことで、点群マッチングによる自己位置推定が十分に機能したことに起因する。
このことから、RTK-GNSS測位による補完は、点群マッチングにおいて建物単位の大きいノイズが発生する場合や、同じ形状が続き固有の特徴点を取得することが難しい場合において、30%程度もしくはそれ以上の改善を示した。
また、建設現場における利用を想定した課題として、日々の工事進捗で変化する現場環境によって、3D都市モデル整備時点から時間が経過するにつれてPCLGマップとリアルマップの乖離が大きくなり続け、点群マッチングによる自己位置測位が機能しなくなる可能性が考えられる。RTK-GNSS測位による補完にも限界があるため、このような変化をPCLGマップに容易に反映する手法、もしくは変化そのものをノイズとして認識させマッチングの対象外とする機能の開発が必要だと考えられる。
*3 RTK測位優位度[%]:RTK-GNSS測位によって補完した点群マッチングによる自己位置推定精度を点群マッチング単体による自己位置推定精度で割った指標

想定利用者向けの検証は、作業手順のデモンストレーション・説明を実施した後、既存・新規開発システムの両方を被験者が操作することで自動運航ルートを作成してもらい、作業時間の計測とアンケート調査を行った。既存システムとしては、統合される前のSENSYN CORE Pilot・Autowareを被験者がそれぞれ操作し、ドローン・車両の自動運航ルートを作成した。検証対象は、建設に関連する民間企業で飛行・走行のルート作成やオペレーション業務を実施する方々計6名とした。
検証の結果、新規開発した「SENSYN CORE Pilot」について、全員が既存システムと比較して半分以下の時間でルート作成作業を完了することができた。また、ルート作成・モニタリングの操作性についても好意的な評価を得られた。
一方で、復路のルート作成をより簡単に実施したい、といったコメントも得られた。通常は、車両・ドローンが特定の地点間を往復する場合、往路と復路とほぼ同じルートを運航することが想定されるが、往路で設定したルートを復路にコピーできる機能は現状搭載していない。完全に同一のルートとはならないことも考えられるため、往路のルートをコピーした上で、それを復路用に自動生成し手動編集できる機能が必要であることが示された。
参加ユーザーからのコメント
ユーザーヒアリングに参加した事業者からのコメント
・直感的に触れるSENSYN COREに一元化されたことで説明を受けずとも触れるようになった。真上表示、真横表示などあるとより経路が設定しやすい
・ルート設定もやりやすく、実際に運航している場所を画面で確認できるのは非常にいい
・運航中のカメラ映像はテレメトリ画面で一緒に確認できるとよいと思います。往路の情報を元に、復路を自動で作れると良い
今後の展望
本プロジェクトでは、車両・ドローンのルート作成・運航管理を一つのシステムに統合したことで、特定条件下での水平・垂直方向の自動運航が可能になったほか、ユーザビリティの向上を実現することができた。また、車両においては、RTK-GNSS測位のデータを利用して点群マッチングから得た自己位置を補完することにより、自己位置推定精度が向上し安定した走行を実現できることが分かった。
今後は、社会実装を見据えて、現場で利用できるレベルまで更にUI/UXを向上させる必要がある。具体的には、手動編集機能を備えた復路ルートの自動生成機能の開発や、真上・真横表示への対応などの視覚的な経路設定の改善を目指す。さらに、建設現場での利用を想定し、工事の進行によって日々更新される現場環境をマップデータに容易に反映できる手法、もしくはノイズを除去しながら自己位置推定精度を保つ手法を検討する必要がある。
これらの取組みにより、建設現場における資材運搬のラストワンマイル輸送の自動化を実現し、省人化・効率化に貢献する自律運航システムの社会実装を目指す。
Technical Report