自動運転車両の自己位置推定におけるVPS(Visual Positioning System)活用
| 実施事業者 | 株式会社三菱総合研究所 / 凸版印刷株式会社 / 国際航業株式会社 |
|---|---|
| 実施協力 | 静岡県 / 東急株式会社 / 国立大学法人東海国立大学機構名古屋大学等 |
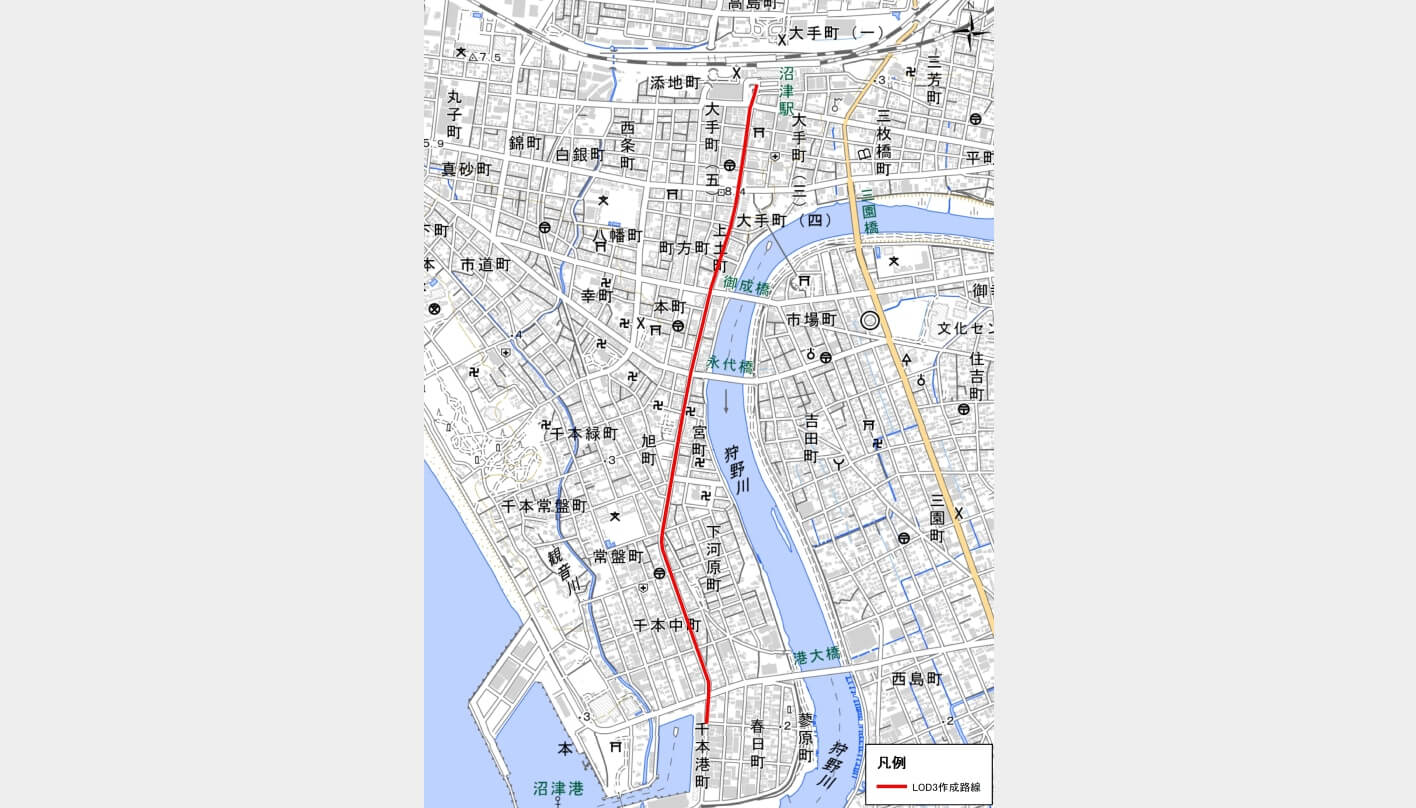
| 実施場所 | 静岡県沼津市(沼津駅から沼津港までの約2km程度) |
| 実施期間 | 2021年7月~2022年3月 |
3D都市モデルとカメラ画像等を組み合わせたVPS(Visual Positioning System)の活用により、自動運転車両の自己位置推定における新たな手法の可能性を検証する。
実証実験の概要
今回の実証実験では、3D都市モデルとカメラ画像等を組み合わせたVPS(Visual Positioning System)の活用により、自動運転車両の自己位置推定における新たな手法の可能性を検証する。
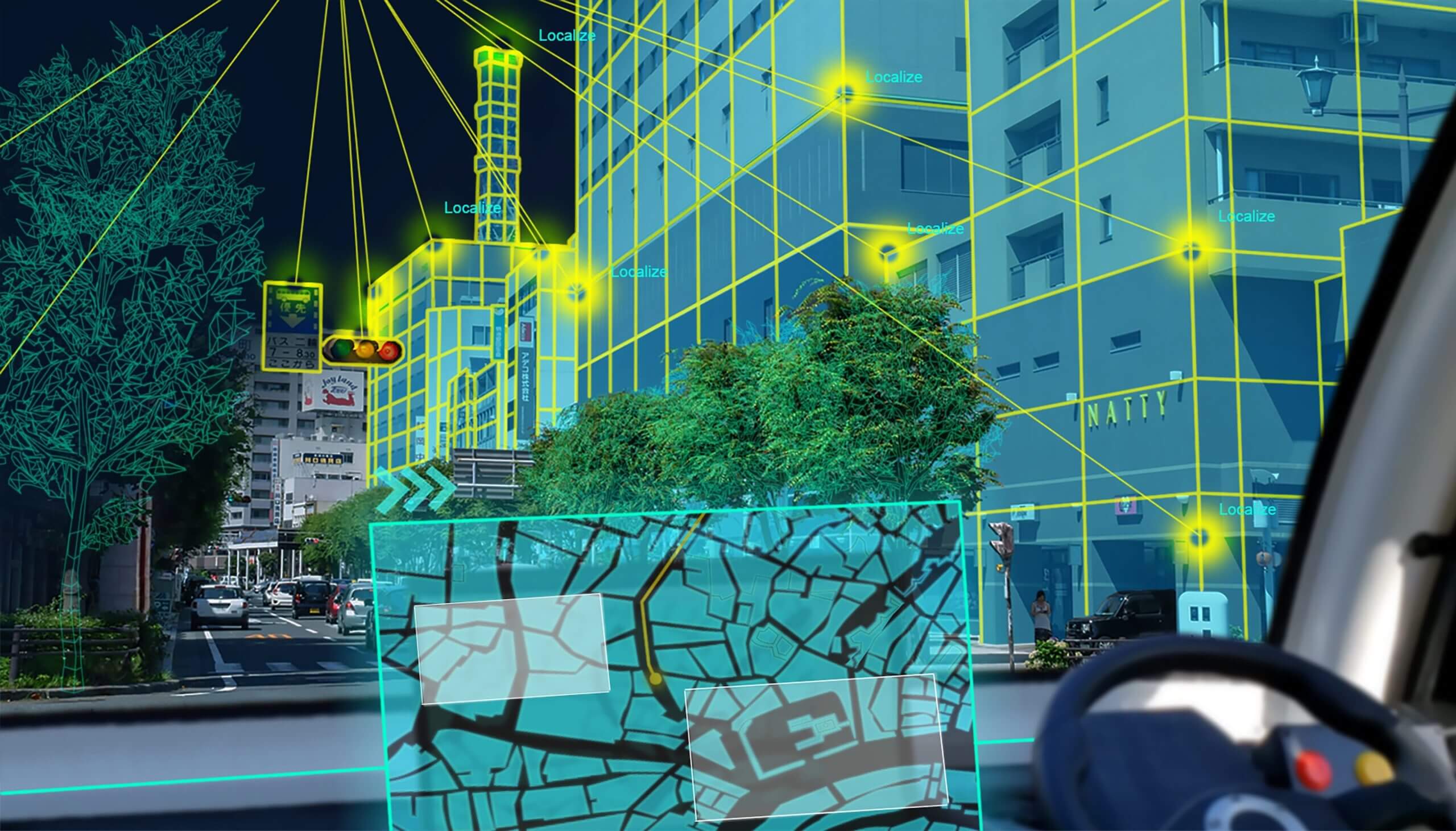
VPSは、光学カメラ画像から取得した画像を三次元解析し、バックデータとして用意した三次元マップと照合することで自己位置を推定する新しい技術である。そこで、VPSを活用し、スマートフォンで撮影したカメラ画像から取得した情報と、LOD3の3D都市モデル(建物の詳細な形状のほか、外構、道路、都市設備等も整備)の特徴点とを照らし合わせることにより、車両の自己位置を推定するシステムを検証し、自動運転システムへの活用を見据えたフィージビリティスタディを行う。
なお、このプロジェクトは、静岡県「しずおか自動運転ShowCASEプロジェクト」令和3年度実証実験と連携を行い実施した。車両や走行環境等は静岡県から提供されたものを利用している。
実現したい価値・目指す世界
自動運転システムにおける車両自己位置推定には、GNSS、LiDAR、速度計、ジャイロスコープ等の各種センサーや、3Dベクトルデータ、3D点群データ等の様々なデータが活用されているが、システム整備に多額の費用がかかることや、走行環境の状況によっては自己位置推定の精度が低下するなどの課題もある。様々な社会課題の解決に大きな役割を果たすことが期待される自動運転の普及のためには、これらの課題を解決し、効率的な自動運転システムを確立することが必要となる。
3D都市モデルは、国土交通省がProject PLATEAUとしてその整備・活用・オープンデータ化を進めるデジタル社会の新たなデジタル・インフラである。オープンデータとして全国で提供される3D都市モデルを活用し、自動運転システムの自己位置推定を可能とすることで、システム導入ごとに「その都度」マップを作成する仕組みや高額のデバイスが必須となる従来の方法を改善し、効率的でスケーラブルな自動運転の普及に貢献することが可能となる。


検証や実証に用いた方法・データ・技術・機材
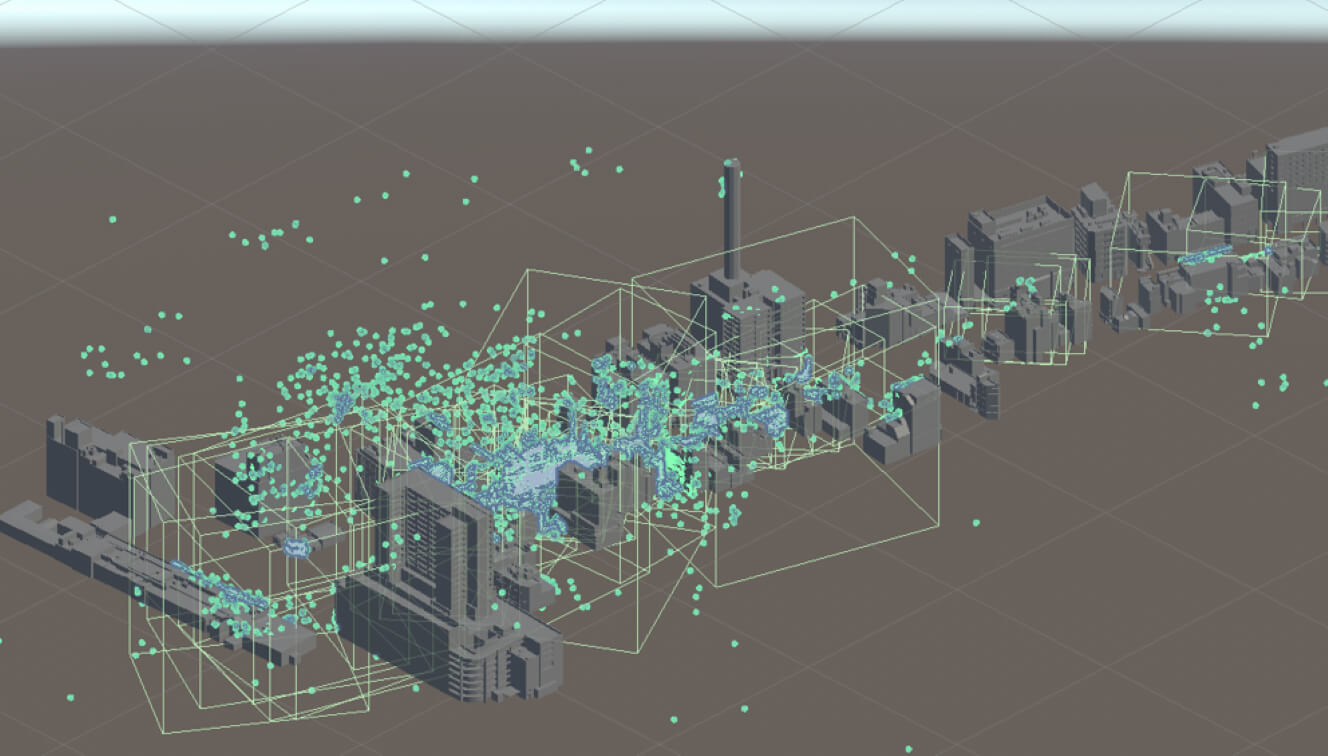
今回の実証実験では、沼津駅から沼津港までのルート周辺を対象としたLOD3の3D都市モデルを活用し、VPSによる自己位置推定の可能性検証を行った。建物の詳細な形状やテクスチャのほか、看板、アーケード、交通標識、道路標示、街灯等の各種都市設備、植生等のデータを整備し、これらのVPSによる活用可能性を検証した。なお、テクスチャについては、航空写真やMMS(Mobile Mapping System)により取得された画像のほか、現地にて手持ちカメラで撮影した画像等も活用し、品質の向上を図ることで、VPSによる画像認識の傾向把握等に活用した。
また、VPSによる自己位置推定の精度を比較検証するため、実験車両に搭載されている自動運転システム(ADENU:Autonomous Drive Enabler by Nagoya University)による自己位置推定データ、走行軌跡データやGNSSによる自己位置推定データについても、取得・活用した。比較検証にあたっては同一時刻における位置推定となるようシステム間連携により時刻同期の設定を行った。


検証で得られたデータ・結果・課題
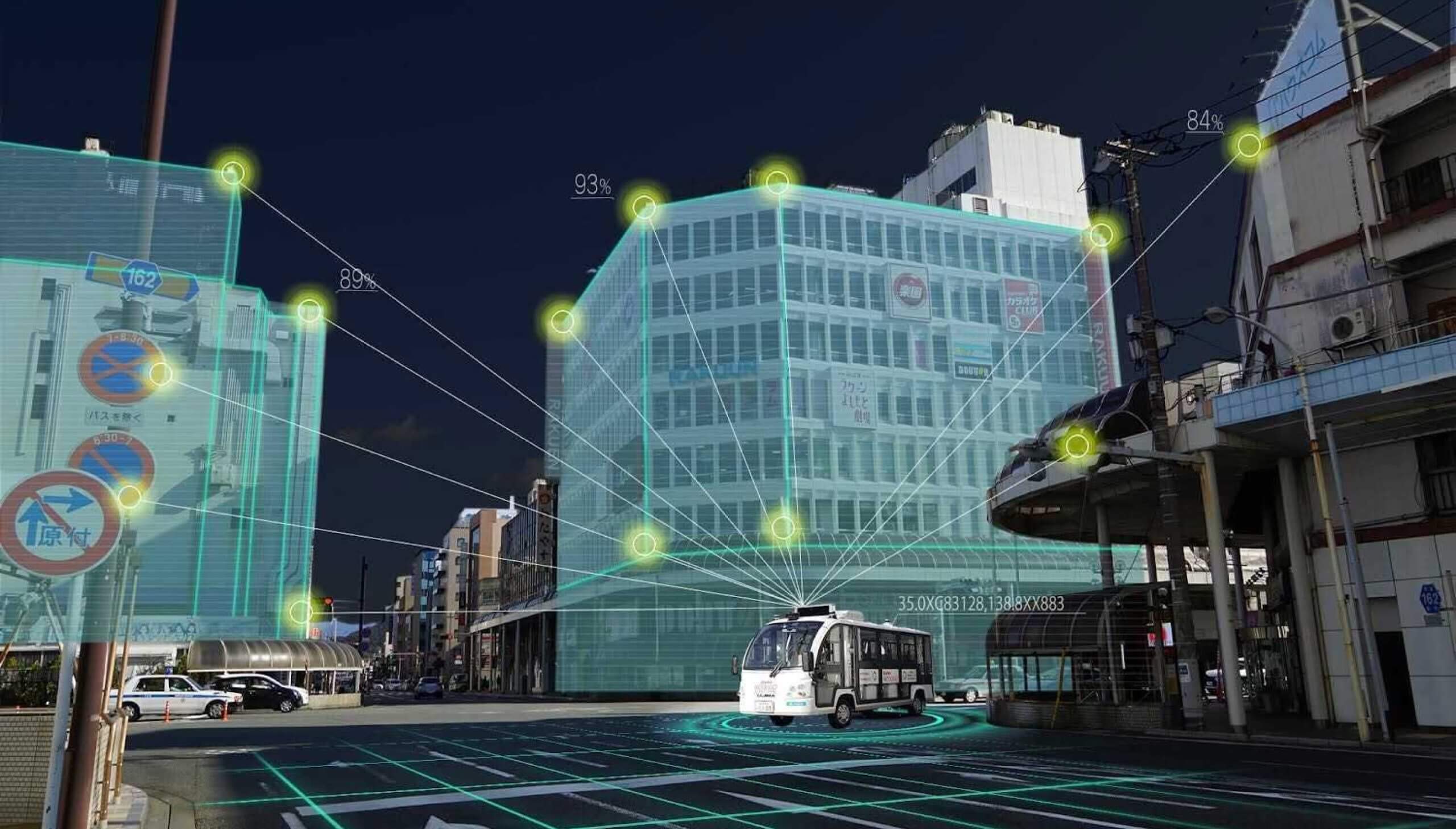
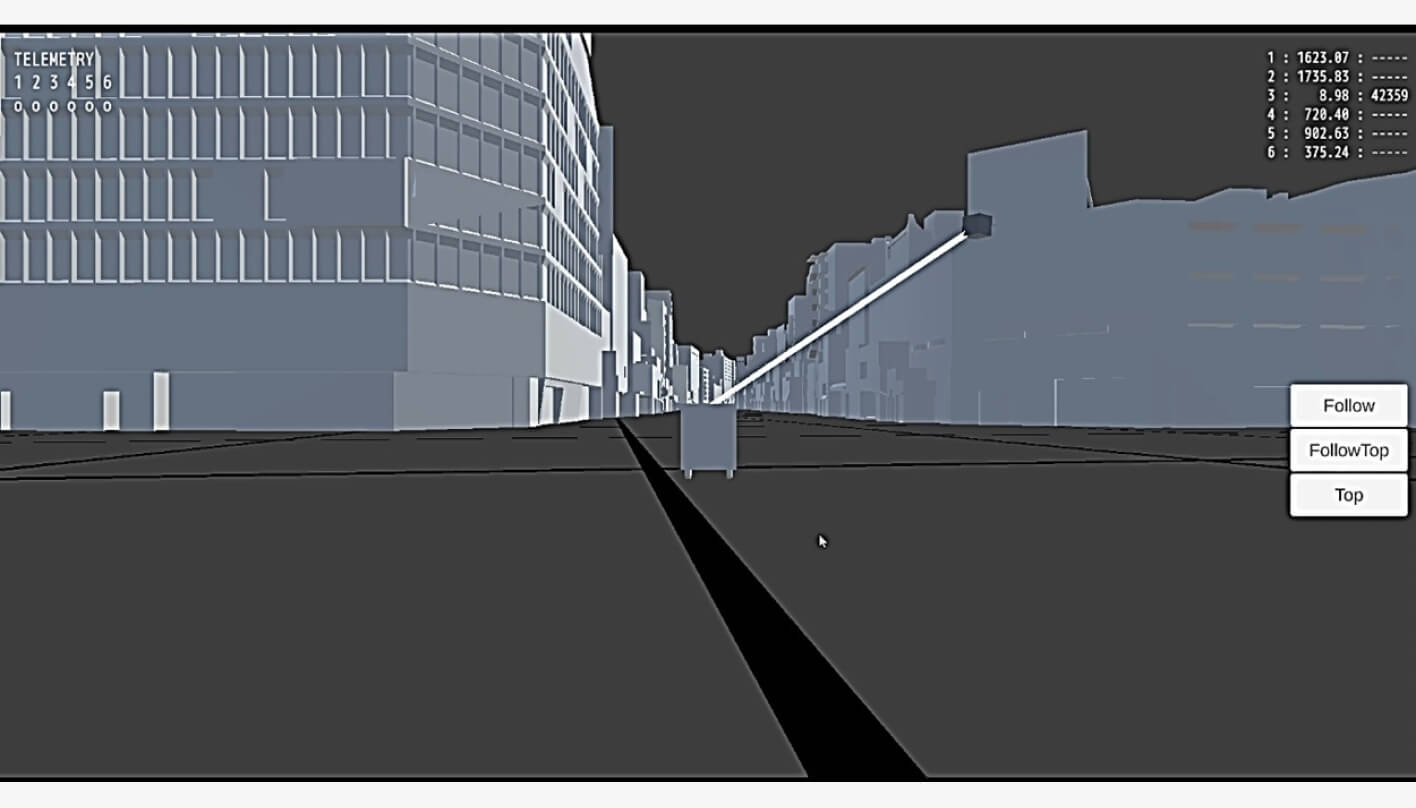
3D都市モデルを活用したVPSにより、19km/h程度で走行する実験車両において、走行ルート周辺の建物・地物の認識・特定(ローカライズ)や、これをもとにした自己位置推定を一定程度行えることが確認できた。
ローカライズのしやすさについては、エリアや走行ルート沿いの建物・看板等の状況により大きな差異があった。沼津駅周辺や沼津港周辺など、一定程度建物が密集し、看板等が多いなど視覚的特徴のあるエリア等ではローカライズしやすいが、中間の住宅地エリアなど、建物の間隔があき看板が少ないエリア等では、ローカライズがしにくい傾向が見受けられた。
VPSによる自己位置推定とADENUやGNSSによる自己位置推定との比較検証では、おおむね同様のルート上に推定位置が分布しているものの、エリアによっては相当程度の差異があることが認められた。また、今回はVPSのデバイスとしてVPSアプリをインストールしたスマートフォンを車両の屋根上に左右に3台ずつ、計6台設置したが、スマートフォンをごとにローカライズや自己位置推定の精度に差が生じていることが確認された。
VPSによる自己位置推定の精度に係る要因としては、3D都市モデルの位置精度やテクスチャの精度・解像度、3D都市モデルを活用したVPS用のマップデータの仕様、VPSソフトウェアによる画像認識の機能・性能、画像認識デバイスの機能・性能、システム運用環境(走行速度に応じた処理速度、天候、通信環境)など、さまざまな要因があると考えられる。今後、これらの要因の具体的な内容・発生状況や、自己位置推定に対する影響の強弱などを分析しつつ、より高精度かつ効率的なVPS開発への取組の展開が期待される。

今後の展望
VPSによる自己位置推定の精度を向上させるためには3D都市モデルのテクスチャ品質を向上させることが直截だが、今回のように標準的な作成方法に加え、別途撮影した高解像度画像を貼り付ける手法は工数の関係から現実的でない。他方、今回の実証においても、ローカライズが成功した地点における位置精度はそれなりに高く、システム側の改善によって更なる精度向上が期待できる。
このため、3D都市モデルを活用したVPSの実用化に向けては、システム側の改善によるローカライズ箇所の増加及び連続的なローカライズを成功率を向上させる手法が有効であると考えられる。
今回の実証で利用した市販のVPSソフトウェアはローカライズのためのアルゴリズムがブラックボックスであり、利用データに対応した調整が困難であった。このため、今後は3D都市モデルに最適化されたシステム自体を開発する必要があり、市販システムやOSS、研究開発中のソフトウェア等を調査していく。