ドローン最適ルートシミュレーション
| 実施事業者 | 株式会社トラジェクトリー |
|---|---|
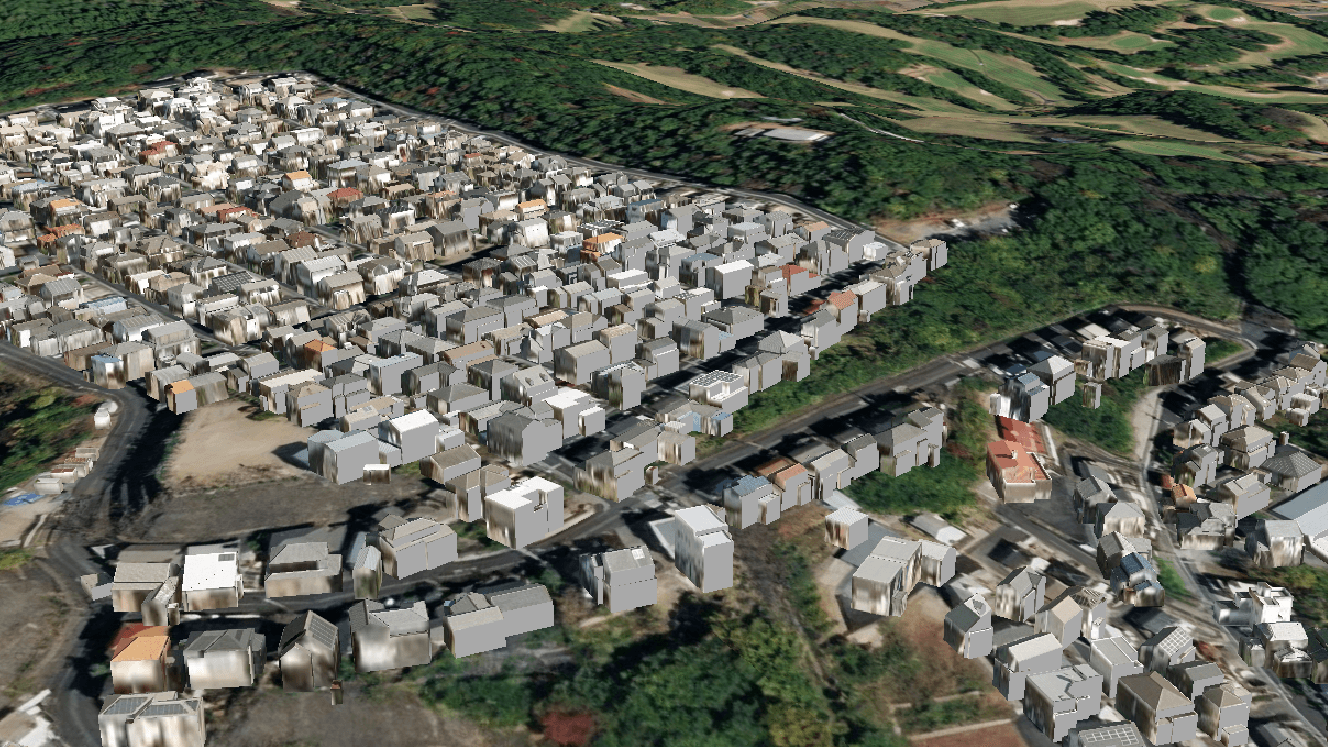
| 実施場所 | 愛知県豊川市 御油地区 |
| 実施期間 | 2022年12月〜2023年1月 |
3D都市モデルを活用し、ドローンルート上のグランドリスクや電波、風況等のエアリスクを評価する新たな手法を開発する。
実証実験の概要
目視外環境における自律型ドローンの社会実装を進める上では、安全性の高いルート設定や風況、電波等の目に見えない環境条件の適切な評価が不可欠である。特に市街地では、地上の用途が多様であり、考慮要素が複雑となる。また、ビル等の影響による局地的な強い風や、家庭・事業所Wi-Fiの影響による電波不良が起こりやすく、風・電波の予測が課題となっている。
今回の実証実験では、3D都市モデルを活用してグランドリスク、風況、電波伝搬状況等の複合的なリスク要素を評価値として空間上にマッピングし、安全性の高いルートを生成するシミュレータを開発することで、誰もがドローンを安全に飛行させることができる社会の実現を目指す。
実現したい価値・目指す世界
市街地におけるドローンのレベル4飛行(有人地帯での補助者なし目視外飛行)運用時には、飛行ルート直下の建物や土地利用の状況(田畑なのか、道路なのか等)、ビル等の影響による局地的な強風等のリスクや電波伝搬の状況等を総合的に考慮した安全性の高い飛行ルートを設定する必要がある。現状、これらを考慮したルート立案は操縦者の経験則に依存しており、自律飛行型ドローンの社会実装を進める上では、このような経験則をシステム化することが必要である。
3D都市モデルの建築物モデルや土地利用モデル等のデータを活用し、市街地における複合的な状況を空間上のリスク評価値として視覚化するシミュレータを開発することで、経験が浅い事業者でも適切なリスク評価を踏まえた飛行ルートを計画し、ドローン飛行を安全に実施することが可能となる。
検証や実証に用いた方法・データ・技術・機材
本実証実験では、3D都市モデルの建物用途及び土地用途を活用し、地上にドローンが落下した場合の損害想定規模から算出するグラウンドリスク、ドローンの安全な飛行の妨げとなる風況の乱れや電波干渉といったエアリスクを算出し、飛行に関わる複合リスクを最小化できるルートを自動生成する最適ルートシミュレーションシステムを構築した。
グラウンドリスク値の算出には、3D都市モデルに付与されている属性情報のうち、建築物モデル及び土地利用モデルの用途を用いた。具体的には、道路・広場・鉄道・商業施設等の不特定多数の第三者が存在する可能性の高い場所及び文教厚生施設・伝統的建造物群保存地区・官公庁施設等の文化的・教育的価値が高い場所を、それ以外の場所と比較し10から100倍のグラウンドリスク値として設定した。
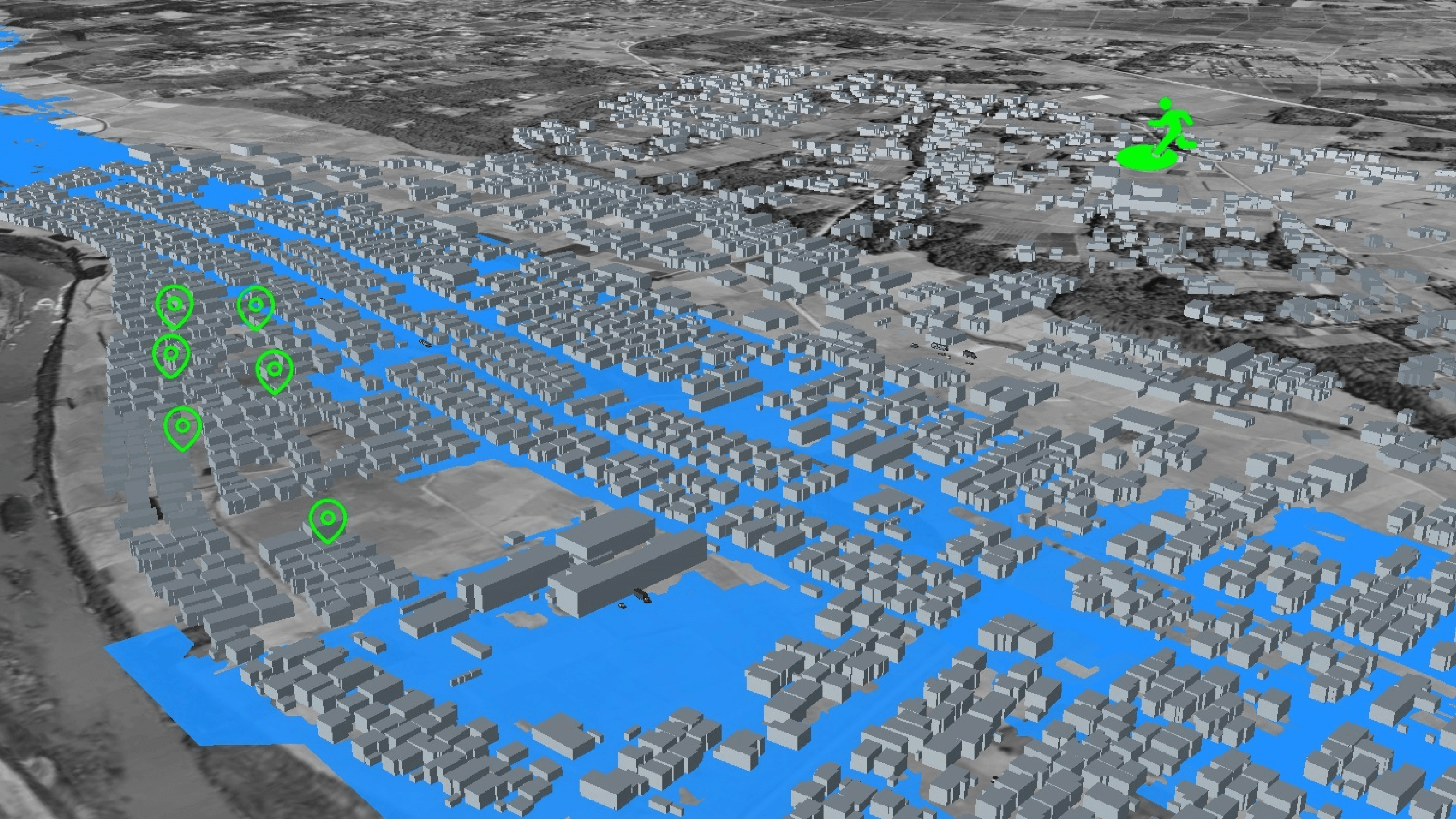
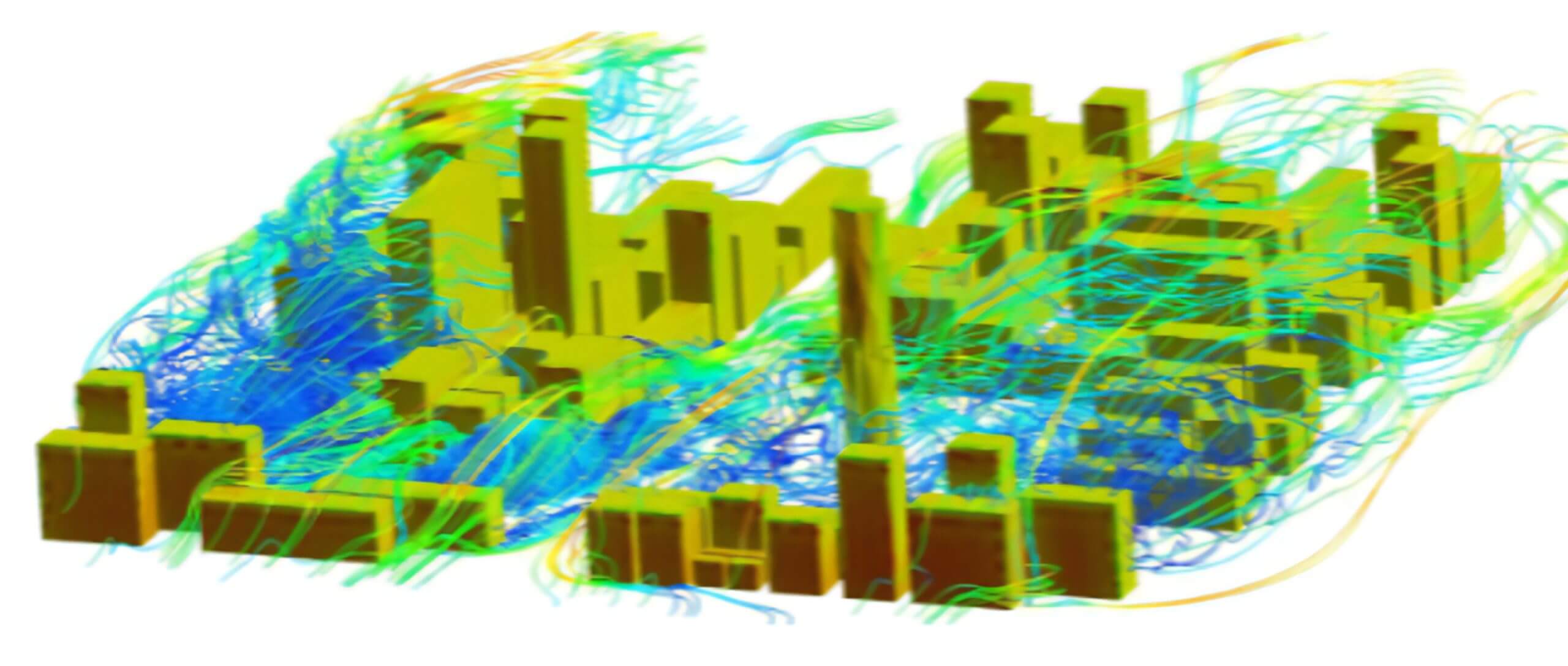
風況リスクは、熱流体シミュレータのAltair AcuSolveを用いた風況シミュレーションの結果から、ドローンの飛行の安定性に影響する渦度(風の流れの局所的な回転)を算出して設定した。風況シミュレーションに当たっては、豊川市ホームページから取得した対象エリアの昨年11月の平均風速・風向を環境条件とし、3D都市モデル(建築物LOD1、地形LOD1)を物理条件とした流体解析を行った。計算結果は1m間隔のグリッドに対して風速(m/s)、風方向成分xy(風向)で出力した。
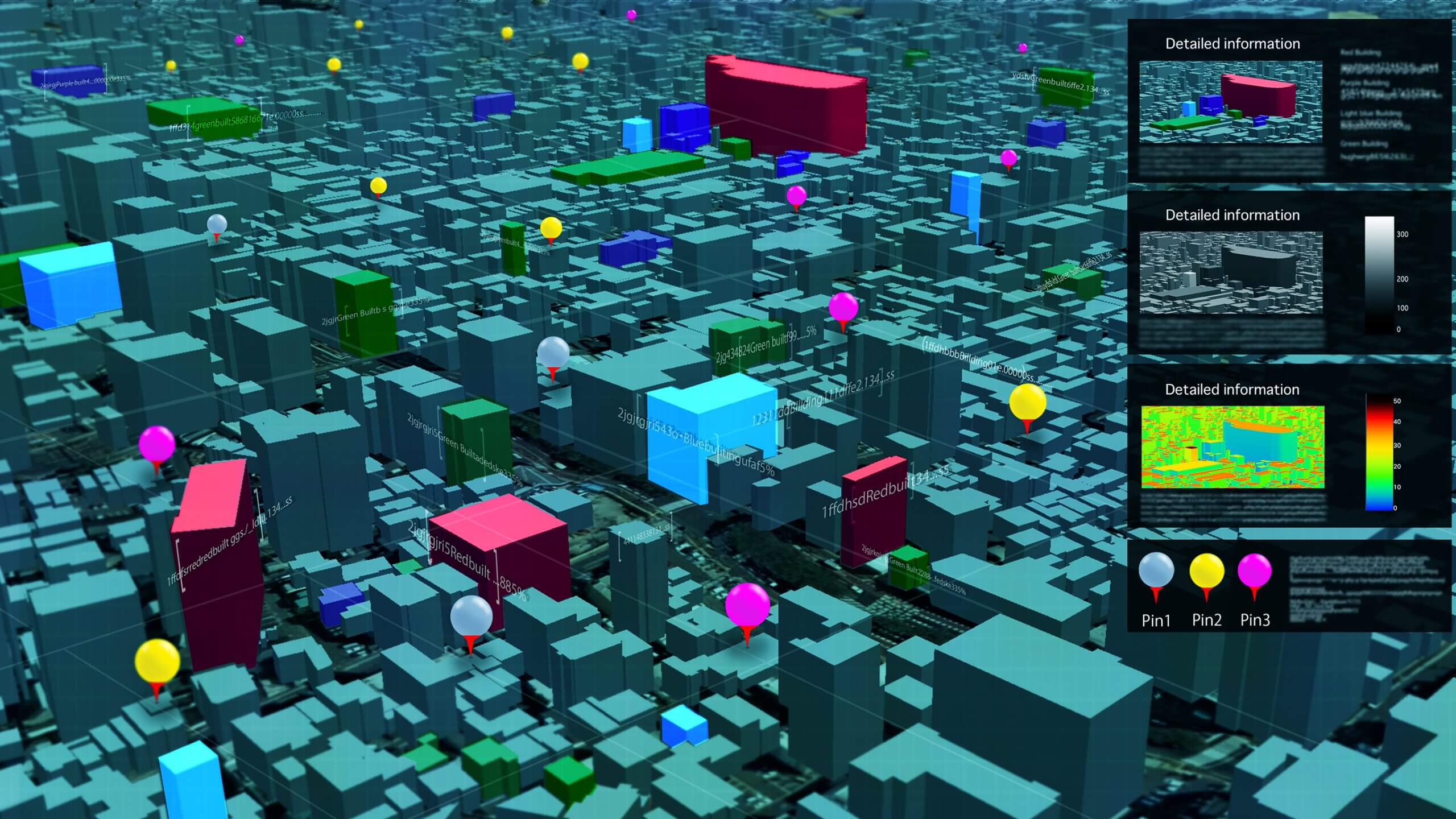
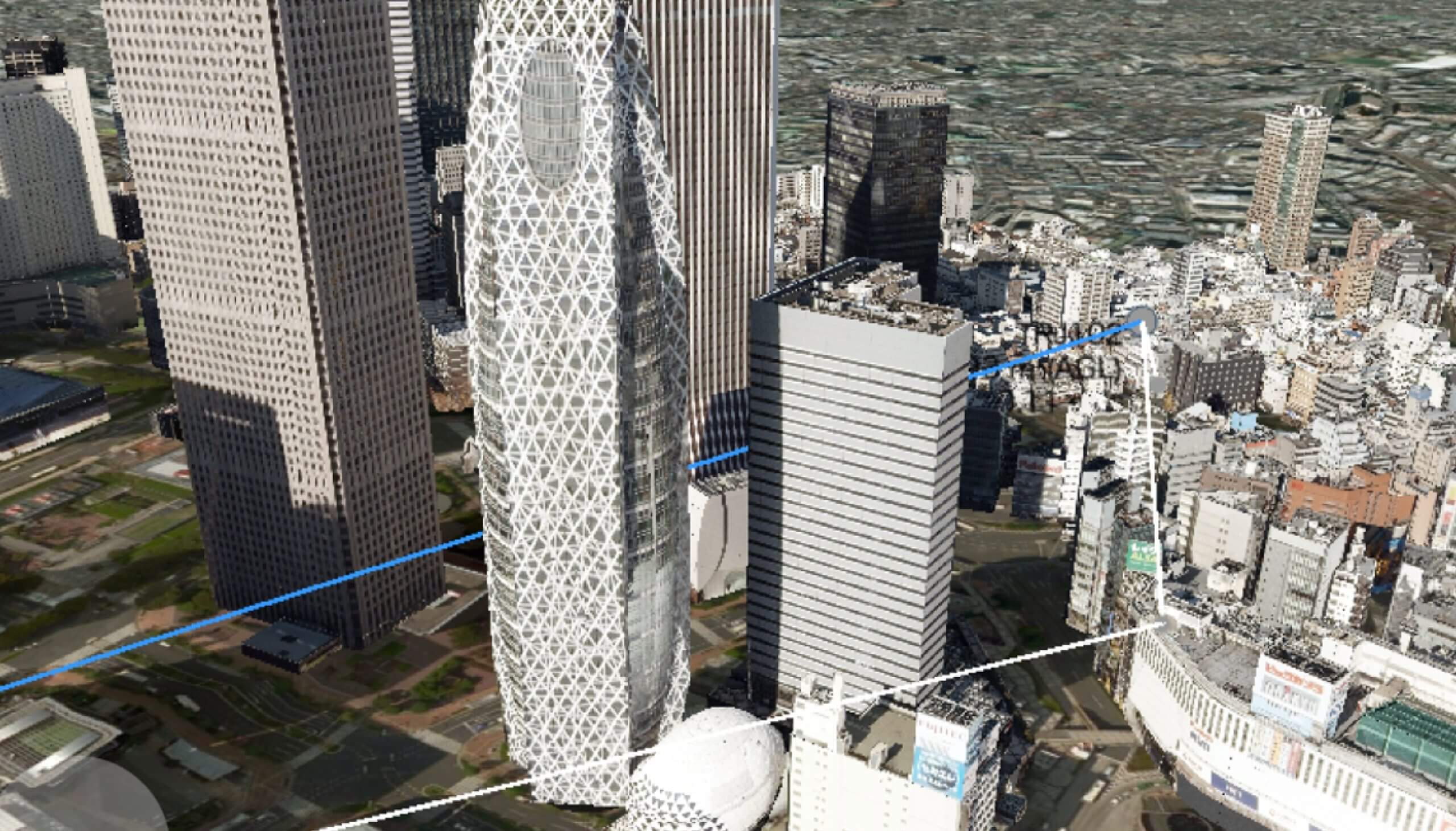
電波リスクは、電磁界シミュレータのAltair Fekoを用いた電波伝搬シミュレーション結果から算出した。電波伝搬シミュレーションに当たっては、シミュレーション対象となる電波の周波数帯が優位に伝搬可能な経路を算出し、その経路に沿った減衰を計算するドミナントパスモデルによる解析を行った。3D都市モデル(建築物LOD1、地形LOD1)は建物・地形による電波の遮蔽と減衰の計算に利用した。また、電波発生源として、仮想のLTE基地局を3ヶ所(マイクロセル1局、ピコセル2局)を3D都市モデルを用いた仮想空間に設置して計算した。計算結果は1m間隔のグリッドで電波強度(dBm)を出力した。
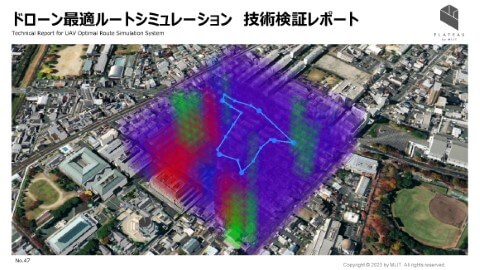
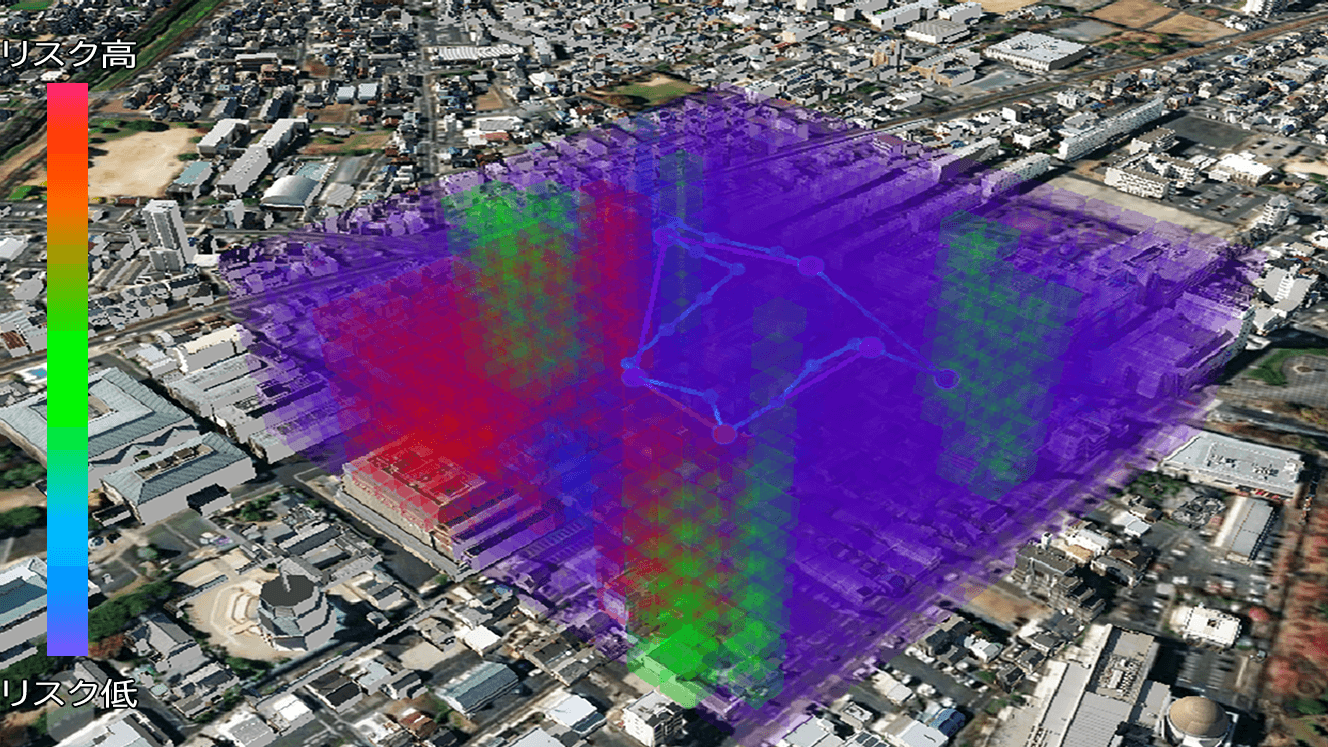
ドローンのルートは三次元的に設定する必要があるため、算出したグラウンドリスク及びエアリスクを三次元空間に投影する仕組みとして、ボクセル単位でリスク値を付与する手法を採用した。ボクセルは1辺10mとし対象エリアを約53万個に区切った。リスク値は、グラウンドリスクとエアリスク(風況リスクと電波リスク)にそれぞれ係数を乗じ積算することで算出した。
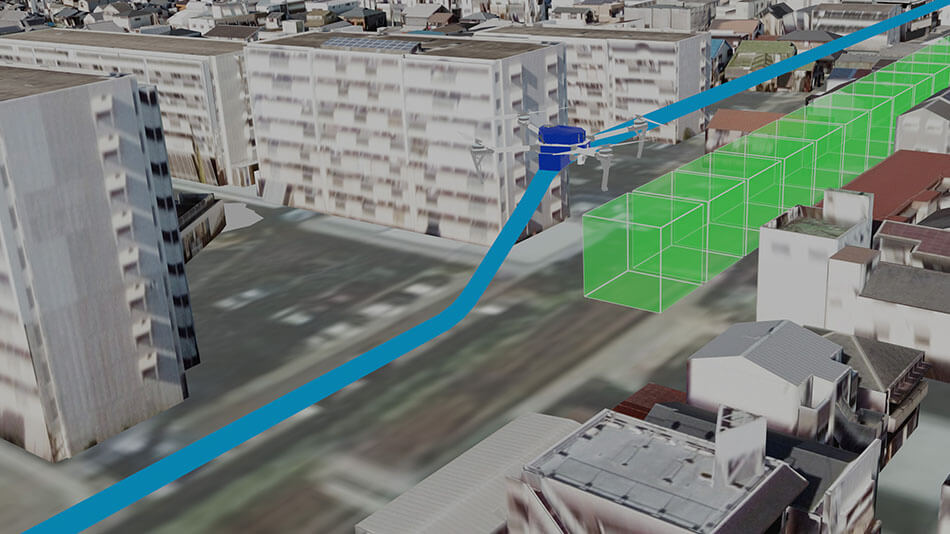
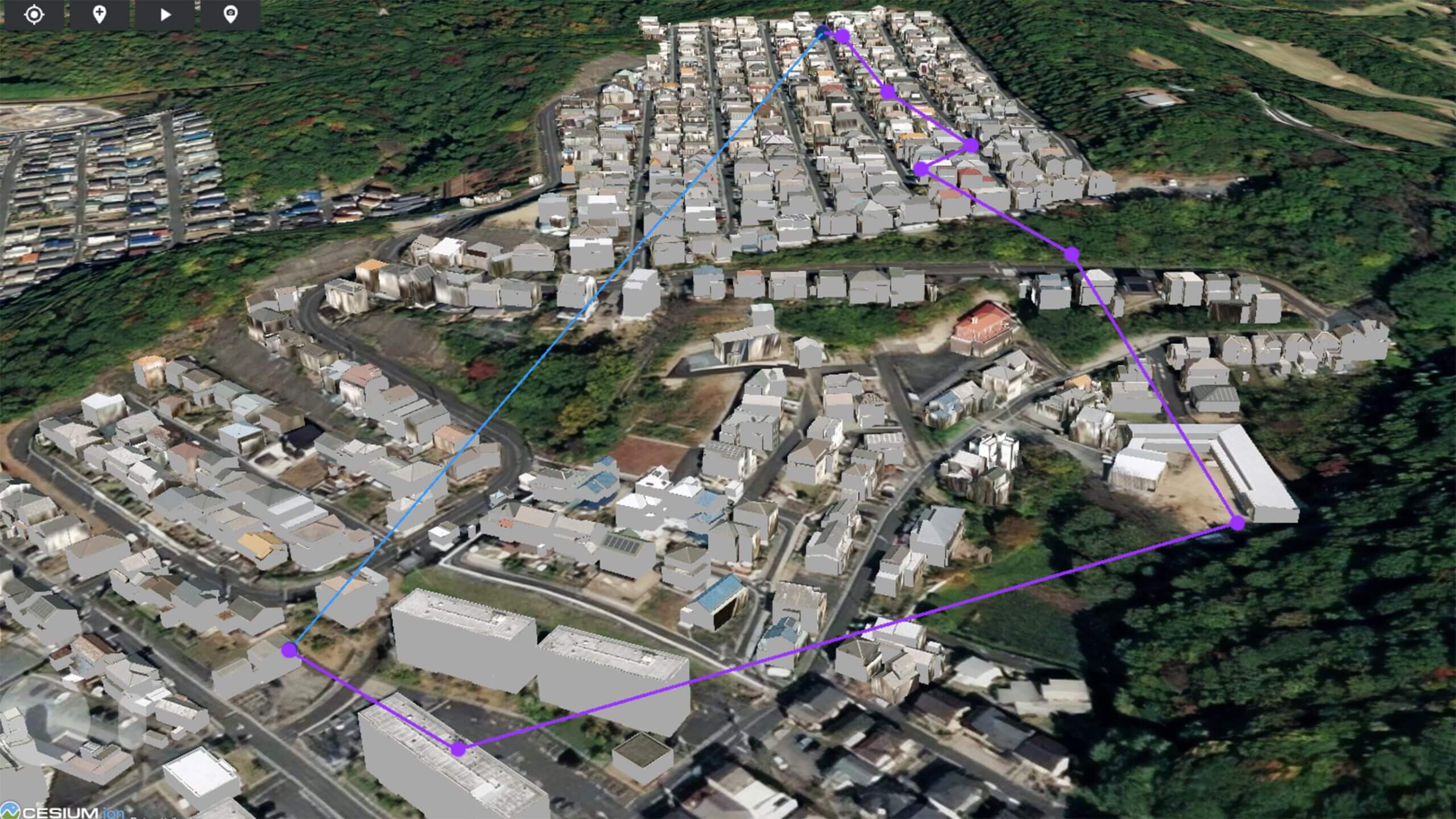
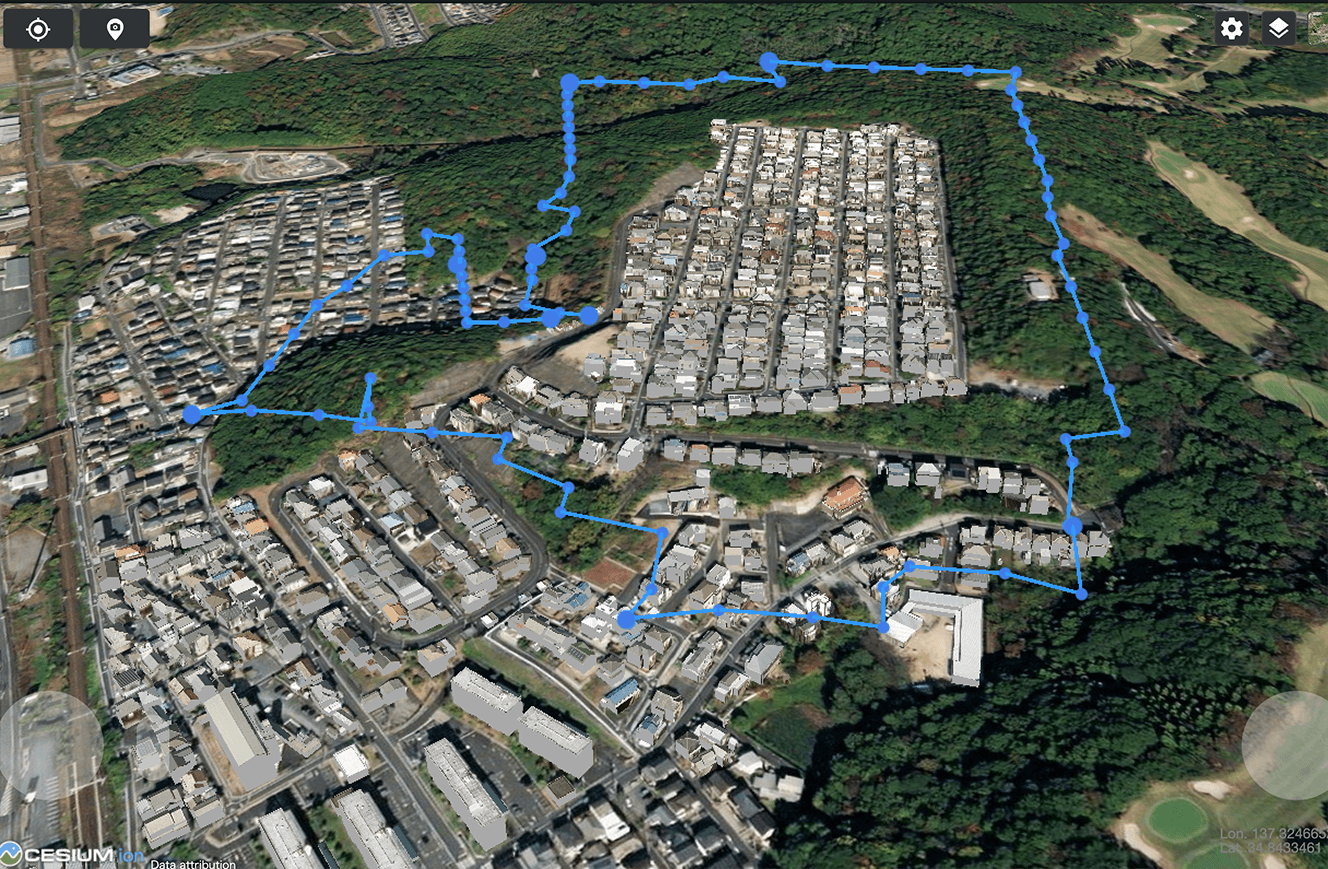
ルートシミュレーションは、まずドローンの出発地及び到着地のウェイポイントをオペレーターが設置し最短ルートを設定した上で、ボクセルに付与されたリスク値を考慮し、リスクと飛行距離が最小となるルートを自動的に算出するシステムとした。この算出のベースとしてダイクストラ法と呼ばれる、ある地点(始点)からある地点(終点)までの最小コストを求めるために区間ごとにコスト評価を繰り返し行うアルゴリズムを利用した。
本システムによって算出したルートの妥当性を検証するため、実際にドローンを飛行させ、シミュレータで生成した飛行ルートを実機でも安全に飛行可能である事の検証を行った。


検証で得られたデータ・結果・課題
豊川市御油地区と諏訪町での実機飛行検証に先立ち、本システムを用いた飛行ルートを演算したところ、リスクを回避する最適な飛行ルートを導出することができた。ウェイポイント(ドローンが通過する点)を手動で入力した飛行ルート(ウェイポイント間は最短経路が割り当てられる)と比較すると、地図や現場の目視では発見しづらい文教厚生施設などを確実に迂回する飛行ルートが自動的に導出されていた。また、実機飛行検証では、風況シミュレーションを元にビル風の発生が予測された高い構造物の上空を迂回した飛行ルートと、迂回しない飛行ルートを実機飛行させた際の飛行ログからドローンの傾斜幅を比較した。結果、迂回ルートの方がドローンの姿勢の勾配・傾斜幅が小さいことが確認できた。地上の構造物の情報は、目視による地図確認、パイロットの現地調査、自治体を通じての住民確認等を経て得ていたが、3D都市モデルを用いる事で容易に取得可能となり、更にはそれらのリスクを反映した飛行ルートも自動算出される事で、パイロットの経験則のみに頼らない、高精度で安全な飛行に寄与することが分かった。
一方で、本検証では空間をボクセル化して管理するためのデータベースを構築し、種類や単位の異なる複数のリスクを複合的にボクセルにマッピングしたが、エアリスクとグラウンドリスクを同等程度の係数値でマッピングすると、エアリスク値の影響が出づらく、それぞれの係数のバランスの調整が度々必要であった。しかしながら、エアリスクのボクセルへのマッピング処理や、改良版のダイクストラ法を採用した飛行ルートの導出では、必要な演算能力が当初想定を大幅に超えており、1回の係数の調整に数日間の時間を要したことから、10㎢以上の広域エリアを対象とするルート算出の実装のハードルが著しく高くなることがわかった。ボクセルが保持する膨大な空間リスク情報を効率的に集約して管理するデータベース技術や、今回実装したダイクストラ法に替わる新たなルート探索アルゴリズムが求められる。
今後の展望
今回の実証実験の結果を踏まえ、グラウンドリスクとエアリスクを総合したボクセルによるリスク分析と、その結果に基づいた最適ルートシミュレータを社会インフラ領域に活用することを志向していく。具体的には3D都市モデルが整備済みエリアの電力・鉄道・道路等の公益事業者のインフラ保守点検業務にドローンを活用することで遠隔監視や点検作業の省力化に資するサービスの提供を目指したい。
今後の実用化に向けては、効率的なデータベース構築技術の開発と、新たな探索アルゴリズムの継続的な研究を進め、より広域での空間リスクの算出とルート探索が可能となるよう注力していく。
また、グラウンドリスクの評価については、本実証実験では暫定的なリスク値設定を行ったが、都市空間内でドローンを飛行させる際に、住宅、道路、公園等の上空を飛行することのリスクをどのように評価すべきか、研究を進める必要がある。電波強度や風況などのエアリスク値の評価についても、タイムリーかつ妥当な値を算出できる仕組みが必要となる。
Technical Report