都市空間の統合デジタルツインの構築
| 実施事業者 | 株式会社竹中工務店 / 株式会社日立製作所 / 株式会社gluon |
|---|---|
| 実施場所 | 大阪府大阪市天満周辺 / 大阪府大阪市本町駅周辺 |
| 実施期間 | 2022年4月~2023年3月 |

3D都市モデルをベースとして異なる3Dデータを統合する手法を開発。あらゆるヒト・ロボティクス・建物・都市をつなぐデジタルツインの構築を実現する。
実証実験の概要
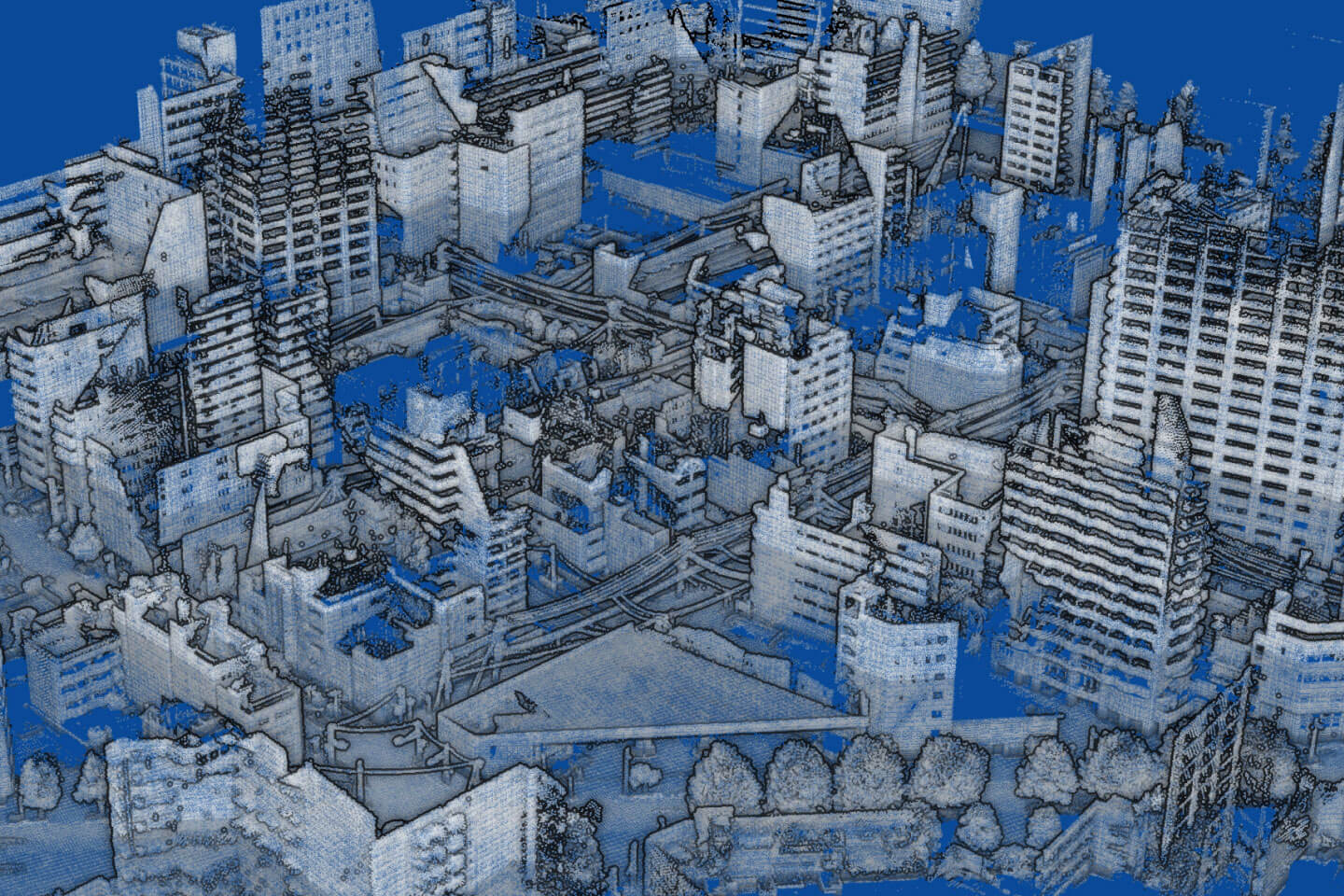
デジタルツインを社会実装していくためには、都市、建物、設備等の様々なオブジェクトを再現する点群、CG、BIMモデル等の様々な3Dデータを統合し、相互運用性を確保することが必要である。
今回の実証実験では、3D都市モデルをベースに、BIMモデルと点群モデルを統合したデジタルツインを構築し、パーソナルモビリティの運行やARナビゲーションの運用をテストする。その上で、データ統合の方法について整理・比較検討し、標準的なモデル統合手法を開発。これらをデジタルツイン構築のための3Dデータ統合ガイドラインとして取り纏めることを目指す。

実現したい価値・目指す世界
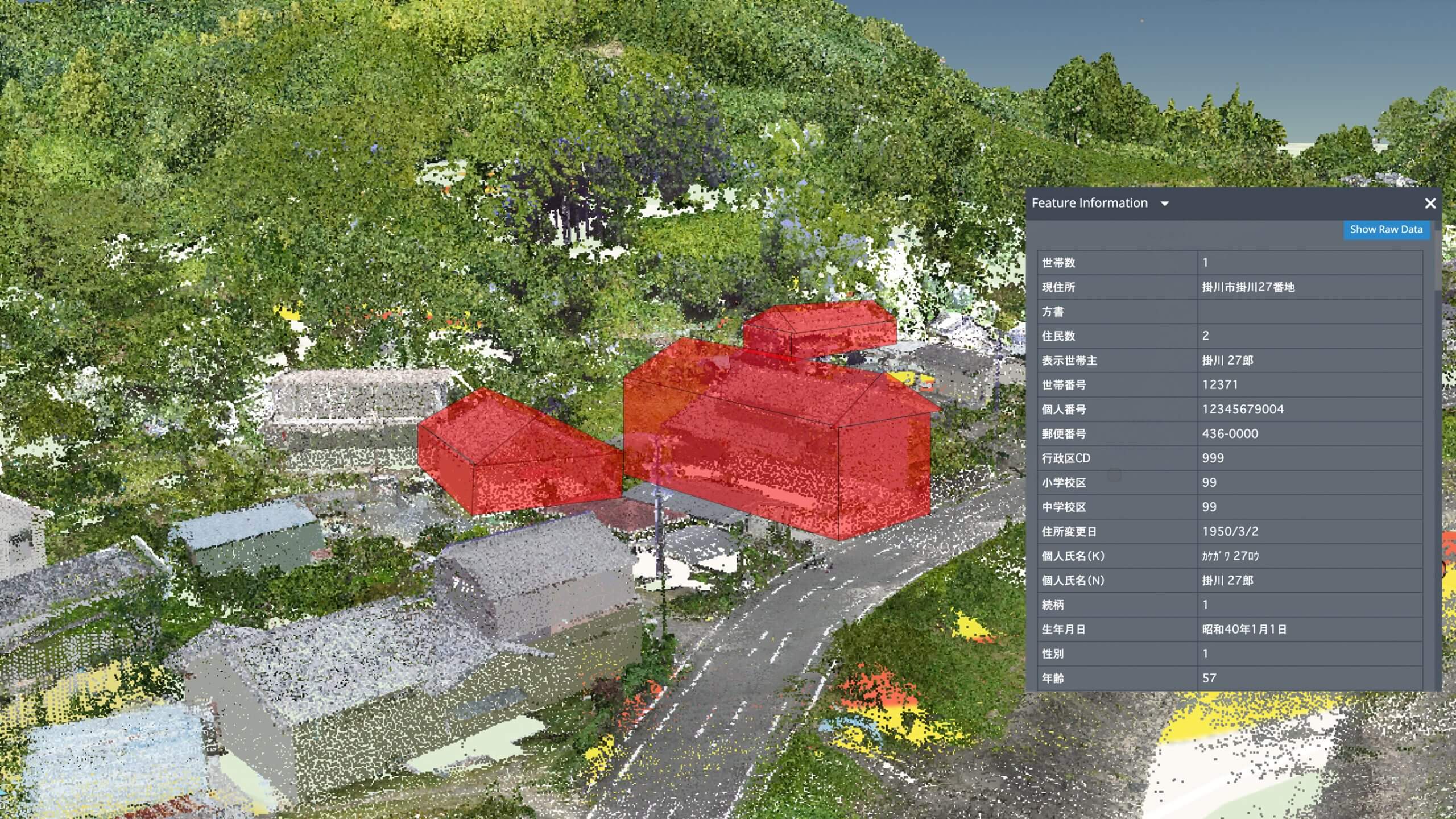
3D都市モデル、BIMモデル、点群データなどの複数の異なる3Dデータを統合したデジタルツインを構築するためには、各データの異なるLOD(詳細度)、位置正確度、座標系、原点、スケール等を統合する方法を開発する必要がある。また、デジタルツインを活用したユースケースの実装コストを低減するためには、ユースケースの類型ごとに必要となる標準的な統合仕様に関する知見を蓄積する必要がある。
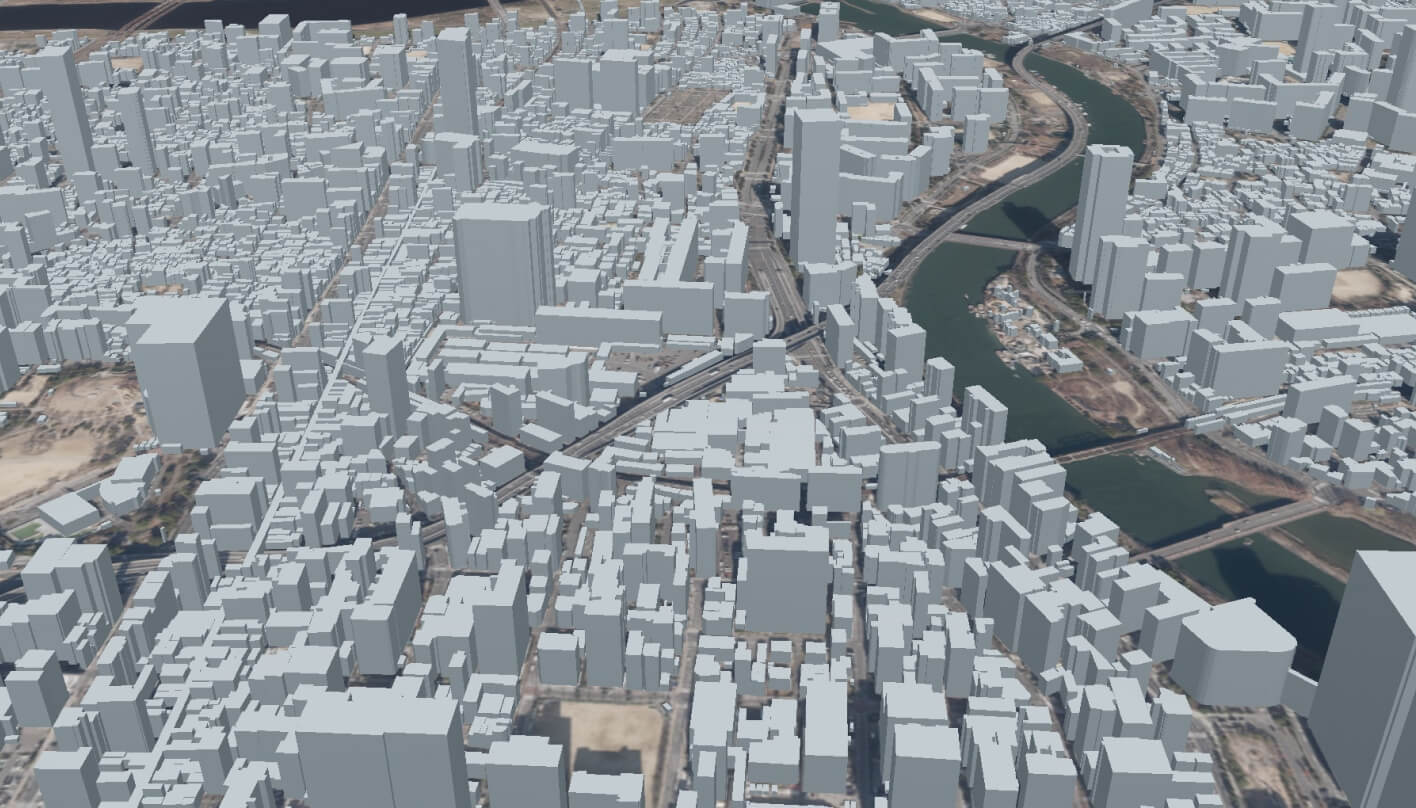
今回の実証実験では、大阪市の3D都市モデルをベースとして複数の異なる3Dデータを統合したデジタルツイン環境を構築し、これを用いて、パーソナルモビリティ運行やARナビゲーションの運用実証を行う。パーソナルモビリティの運行実証では、想定走行ルートと現実走行ルート間の誤差の検証を、ARナビゲーションの運用実証では、ARでの案内表示やルート表示にズレ等が無いか確認することで、デジタルツインに必要となるモデル精度の検証を行う。また、これらの検証を通じて得られた知見を踏まえモデル統合手法を開発し、ガイドラインとして公開することを目指す。

検証や実証に用いた方法・データ・技術・機材
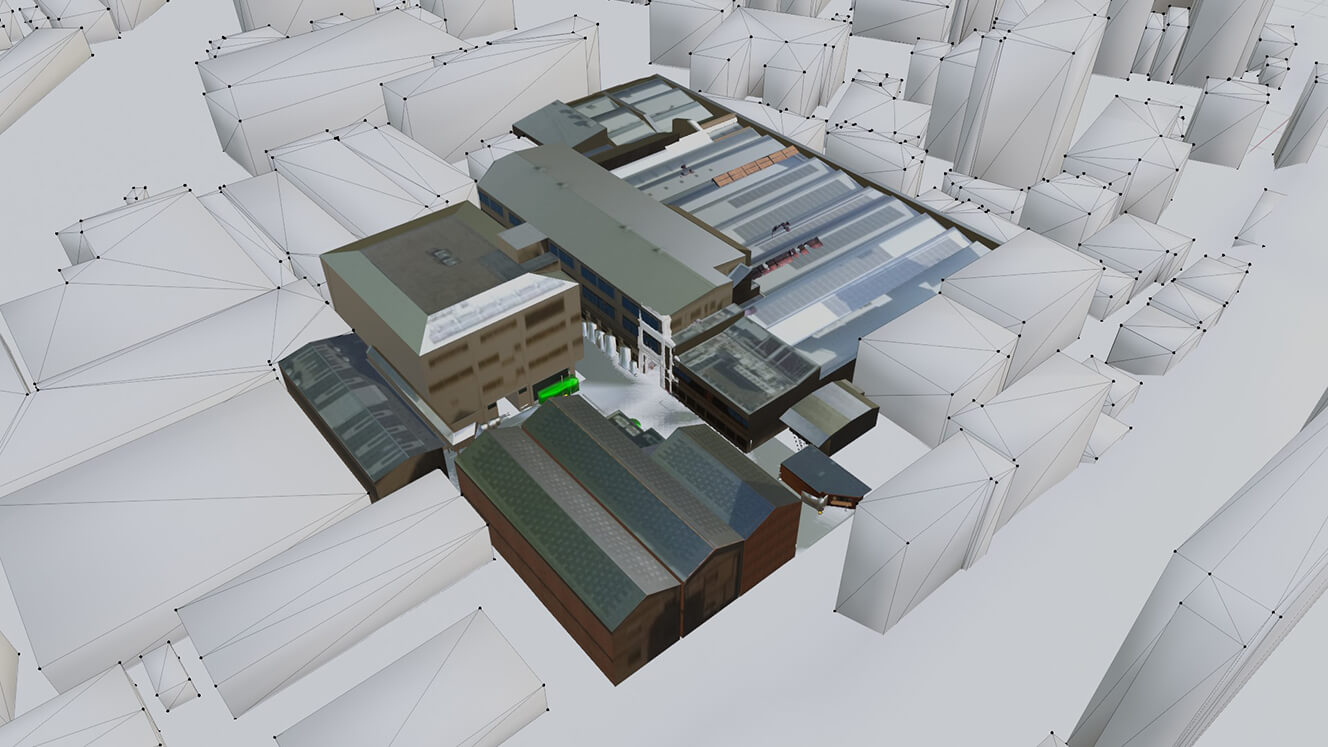
3D都市モデル、BIMモデル、点群データなどの複数の異なる3Dデータを統合したデジタルツインを構築するため、各データの異なる詳細度(LOD)、位置正確度、座標系、原点、スケール等を調整し、統合するための手法開発を行った。さらに、これらの手法によって統合されたデジタルツインデータが実用的な精度を有するかを検証するため、Unityをベースとしたスマートフォン用のARナビアプリと、Unreal Engine(以下UE)をベースとしたパーソナルモビリティ(電動車いすWHILL)運行システムを開発した。
統合デジタルツインの構築には3D CGソフトウェア の Blenderを利用した。Blenderで扱うfbx/obj形式に変換するためのツールとして、FME Desktop(3D都市モデルのデータ形式変換ツール)、CloudCompare(点群のデータ形式変換ツール)、MetaShape(点群の編集ツール) 、ARCHICAD(BIMの編集・変換ツール)を用いた。これらを Blenderにてデータ統合を行い、UnityやUEといったゲームエンジンで利用可能で、3DCGとシミュレーションの双方に適するファイル形式のUSD(Universal Scene Description)で出力を行った。
3Dデータの統合は次の4つの手法で行い、それぞれの手法についてユースケースを通して精度検証を行った。
① 1つの基準点をもとに回転と移動だけで位置合わせを行い、データを統合
② 各データ内の複数点を参照しそれらの平均から位置合わせを行い、データを統合
③ 統合前のデータを接続部分ごとにグループ化しグループごとに微調整し、データを統合
④ ②に追加でデータの接続部を変形させて整合し、データを統合
統合されたデータを用いて、具体的なアプリケーション開発を行った。
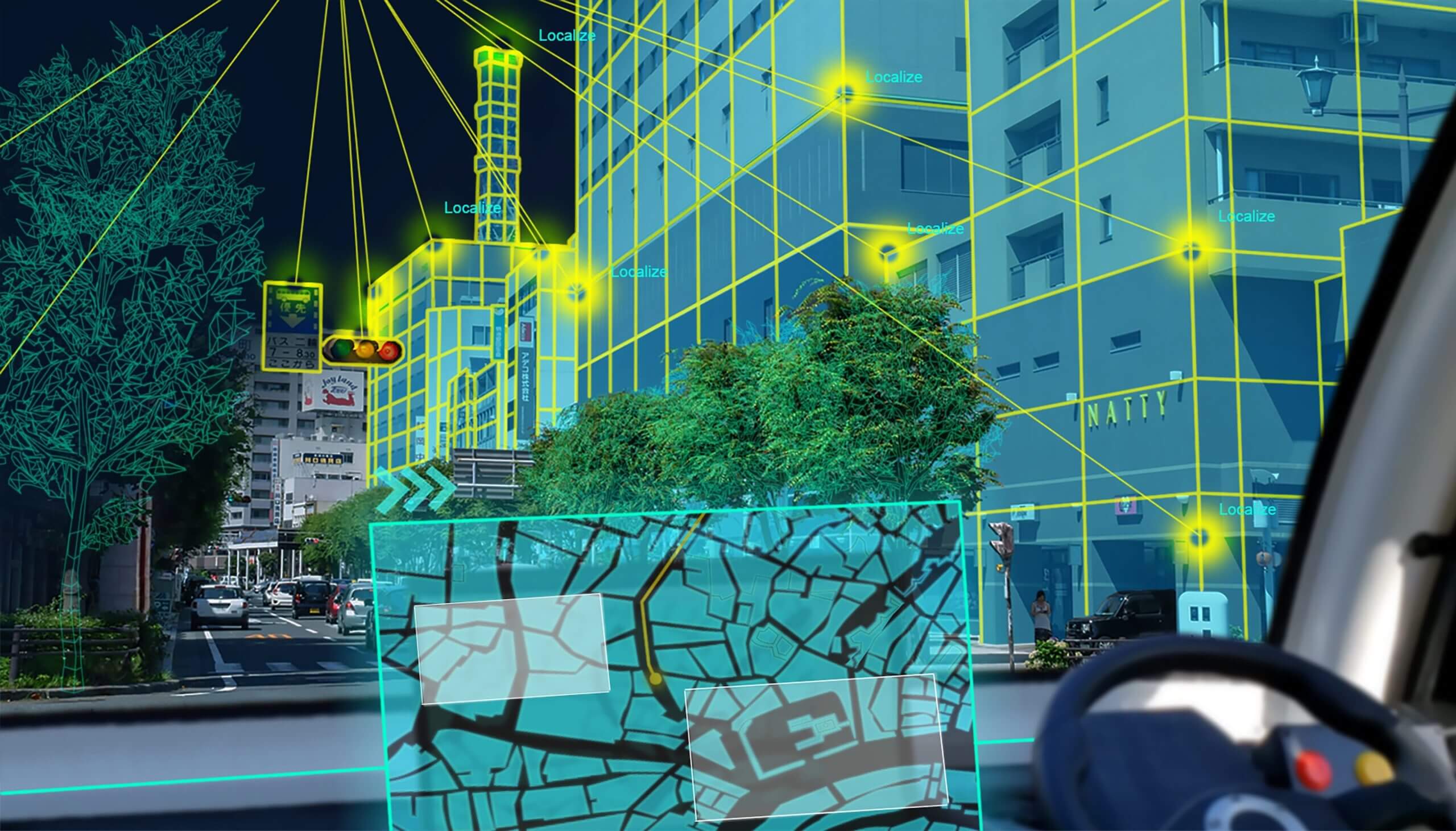
ARナビアプリは、屋外、屋内、地下街など多様な空間における歩行者ナビゲーションをシームレスに提供するためのアプリケーションであり、タブレット等のAR画面に目的地までの経路が表示され、直感的に進行方向がわかる仕組みとなっている。具体的には、①デジタルツイン空間における経路探索機能、②タブレットカメラを通じて自己位置を推定する機能、③タブレット画面へARによる経路表示の3機能で構成されている。①経路探索機能は統合されたデジタルツインデータを元にゲームエンジンUnityのNavmesh機能を用いユーザーの位置と目的地までの最短経路を生成する仕組みとなっている。②ユーザーの自己位置推定にはImmersalを活用したVPS(Visual Positioning System)を用いている。③AR表示機能は、UnityのAR Foundationフレームワークを用いて実装した。
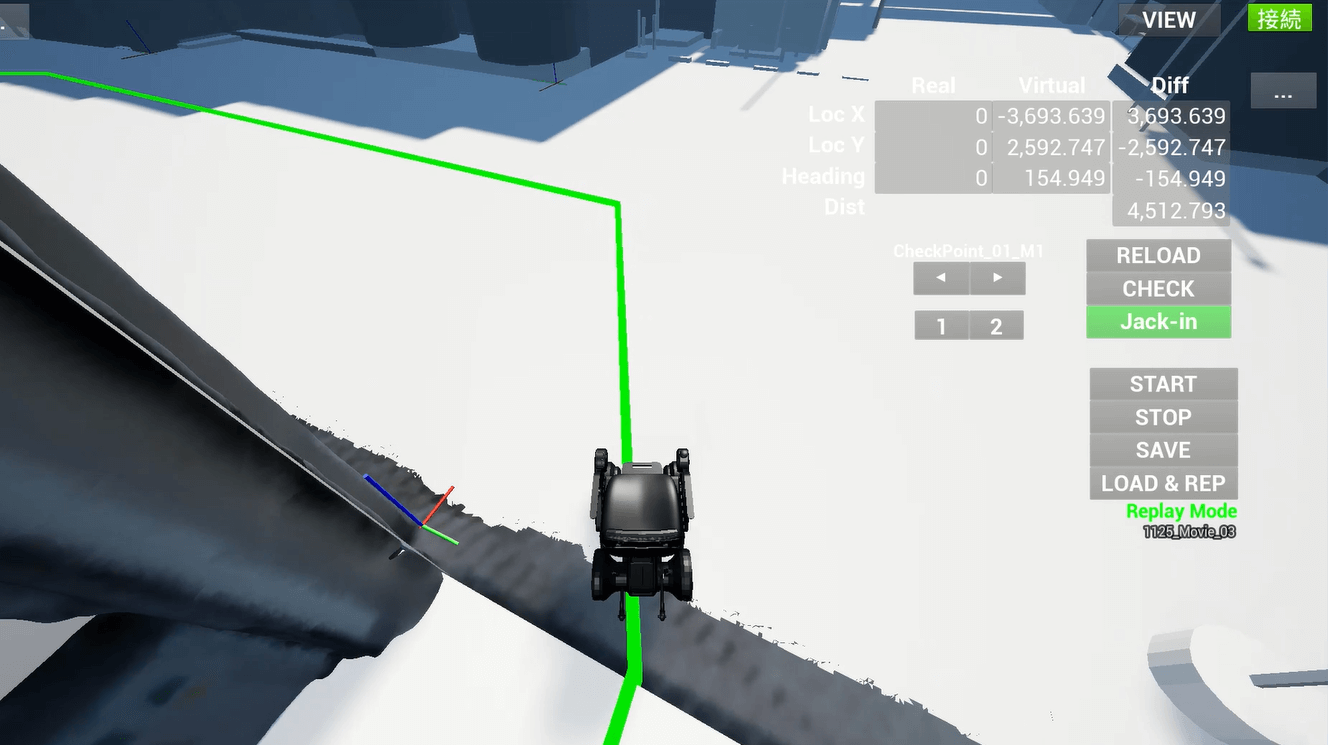
パーソナルモビリティ運用システムは、デジタルツイン空間上でモビリティの経路指示、位置情報のリアルタイムモニタリング、発進や停止等のオペレーションが可能なシステムとなっている。具体的には、①デジタルツイン空間における経路探索機能、②モビリティの位置をデジタルツイン空間へフィードバックする機能、③モビリティの位置を補正する機能の3機能で構成されている。①経路探索機能は、ゲームエンジンであるUEのナビゲーション機能を用いて実現し、UE上で、モビリティの現在位置から目的地までの最短経路を生成し経路情報をモビリティに送信する。モビリティは受信した経路に追従するよう走行する。②モビリティの位置をフィードバックする機能は、モビリティのオドメトリ(車輪の回転量等から相対移動量を得る機能)機能で得た移動量を①システムへ送信し、デジタルツイン空間上でのモビリティ位置に逐次反映する仕組みとなっている。③モビリティの位置を補正する機能は、建物側に固定設置されたLiDARセンサー(レーザーを使って周囲の点群の取得するセンサー)でモビリティの位置を検出し、デジタルツイン空間上のモビリティ位置に反映することで実現している。①と②の機能を組み合わせることで、モビリティの詳細な移動量をオドメトリから取得しつつ、その誤差(移動距離が大きくなるほど拡大)を環境側のLiDARセンサーで補正し、長距離の移動であっても精度高く位置情報を取得することができる。
2つのアプリケーションの実証を通じ、デジタルツインデータを作成するための統合手法の効率性と精度の検証を行った。


検証で得られたデータ・結果・課題
ARナビゲーションは大阪市本町駅周辺、パーソナルモビリティは大阪市天満のCGLL(コモングラウンドリビングラボ)で実証実験をおこなった。
ARナビゲーションを使った精度検証は3Dデータの4つの統合手法のうち、①④による統合モデルを使い、モデルごとに評価を行った。検証ルートは本町駅構内をスタート地点にエレベータを使用し地上へ、その後、御堂筋の歩道を通り、建物出入口より入館し、建物内ではスロープを経由しエレベータホールの中心部をゴール地点とした。検証方法はナビゲーションアプリケーションで案内されたいくつかの計測ポイントにおいてARナビ上での指示ポイントと現地計測ポイント、最終到達地点と、現地設定したゴール地点の位置の差をメジャーで測定し誤差を算出した。実証エリアの通路幅5mに対して、誤差KPIを2.5mと設定した条件で、誤差は最大でも0.9m、平均値0.23m程度と歩行者を案内するナビゲーションとしては十分なレベルが得られた。
パーソナルモビリティ運行の精度検証は3Dデータの4つの統合手法のうち、①②③によって作られた統合モデルを使い、モデルごとに評価を行った。CGLLの室内をスタート地点とし、廊下を経て建物出入口より屋外へ、敷地玄関付近を経由し、スタート地点まで同ルートで戻る経路を設定した。検証では実際のモビリティの通過点とデジタル空間上でも設定した実際の設定点との距離差をメジャーにて測定し、誤差を算出した。結果としてデジタルツイン空間で設定したルートを安全に走行することができた。実証エリアの通路幅2.0mに対して幅0.55mのパーソナルモビリティが安全に通過できることを目標としKPIを0.6mと設定したが、誤差は最大でも0.53m程度、平均値でも0.2m程度の誤差に収まっており、モビリティの運行に支障ないレベルであった。
一方で、統合モデルには存在しないオブジェクトである、駐車車両、工事用仮囲いなどが現実空間に一時的な障害物として存在するケースが想定される。本実証実験においては影響がなかったものの、将来の運用時上の課題になり得ることが考えられる。別途アプリケーション側での設定を行う等の回避機能を持たせることが必要である。
また、データの統合の際、BIMモデルが計画段階で構築されたものだったため実際と異なっているという問題もあった。複数の3Dデータを統合し重ね合わせることで検出できるものの、実用に向けては統合するデータ間での時間的整合性に注視し、事前に確認し対処しておく必要性が改めて確認された。


今後の展望
本実証実験の結果を踏まえて、3D都市モデルとBIMモデル、点群データを統合した「統合デジタルツイン」の有用性が示された。特に、リッチな情報を持つ3D都市モデルがあらゆる3Dデータの中核となり、データ統合における基準としての役割を果たしていくと考えられる。統合デジタルツインがより多様なユースケースを生み出していくため、より高い精度を実現するデータ統合手法の開発を進めるとともに、今回開発した統合手法の自動化も進めていきたい。課題として挙げられた移動物の取り扱いやデータ作成の時点の違いについても、統合データを使ったデジタルツインプラットフォーム上で管理を行うことで実用化を目指す。
将来的には、3Dデータの統合手法の標準化を推し進め、ヒトモノの移動支援情報として3D都市モデルを基盤とした統合型デジタルツインプラットフォームの提供を通じて、ヒトモノの流れを効率化するだけなく安全・安心を担保し高付加価値な都市空間づくりに寄与していく。
Technical Report