
ロボット技術
<概要>
国土交通省では、i-Constructionが目指す生産性向上、働き方改革並びに多様な主体による持続可能な建設業の実現に向けて、他産業で実用化が進むパワーアシストスーツ(PAS)について、建設現場への円滑な導入に向けた検討を実施しています。
そこで、本取組を推進するため、「ICT導入協議会」の下に「建設施工におけるパワーアシストスーツ導入に関するWG」を令和2年8月5日に設置いたしました。その後、パワーアシストスーツだけに限らず、建設現場で従事する技能者が働きやすい環境の構築、安全性と生産性の向上を目指し、新たな技術を導入することによる現場作業の変革に向けた取組をより一層進めるため、令和4年10月5日、「建設施工における現場作業者支援のDXに関するWG」と名称を改め、現在WGを進めているところです。
本WGの活動状況等につきましては、下記の専用ページをご覧ください。
◆建設現場における現場作業者支援のDXに関するWG (旧:建設施工におけるパワーアシストスーツ導入に関するWG)
<本法律の主旨>
デジタル技術の急速な発展や我が国を取り巻く国際経済環境等の変化に伴い、Society5.0の実現に不可欠な社会基盤となる特定高度情報通信技術活用システム(5G、ドローン)のサイバーセキュリティ等を確保しながら、その適切な開発供給及び導入を行う重要性が増大しています。
こうした状況を踏まえて、我が国の産業基盤を整備し、特定高度情報通信技術活用システムの普及を図るために必要な措置を講じます。
<概要>
令和2年8月31日に施行された本法律に基づき、「特定高度情報通信技術活用システム開発供給計画(以下、開発供給計画という)」及び「特定高度情報通信技術活用システム導入計画(以下、導入計画という)」の認定を受けることにより、課税の特例や金融支援等を受けることが出来ます。
国土交通省所管事業に関する導入計画の認定状況や詳細等については以下のページを御参照ください。
◆5G情報通信システム(法第2条第1項第1号)について(経済産業省HP)
◆ドローン(法第2条第1項第2号)について(経済産業省HP)
3-1.建設ロボット技術に関する懇談会
建設ロボット技術について、今後の調査・開発・活用の方向性やその実現に向けた方策などを取りまとめることを目的に「建設ロボット技術に関する懇談会(座長 油田 信一 芝浦工業大学特任教授)」を設置し、計3回(平成24年10月26日、平成25年2月6日、3月22日)の懇談会を開催致しました。
懇談会の成果を「建設ロボット技術の開発・活用に向けて~災害・老朽化に立ち向かい、建設現場を変える力~」としてとりまとめております。
◆建設ロボット技術に関する懇談会 提言【本文】(平成25年4月15日策定)
3-2.次世代社会インフラ用ロボット現場検証委員会
~委員会設置背景~
国土交通省及び経済産業省では、社会インフラの現場ニーズに基づき、国内外の異分野も含めた産学の技術シーズを踏まえ、「維持管理・災害対応(調査)・災害対応(施工)」の3つの重要な場面におけるロボットについて、その開発・導入分野を明確化するなど実用化に向けた方策を検討するため、「次世代社会インフラ用ロボット開発・導入検討会」を平成25年7月16日に設置し、「次世代社会インフラ用ロボット開発・導入重点分野」を平成25年12月25日に策定しました。
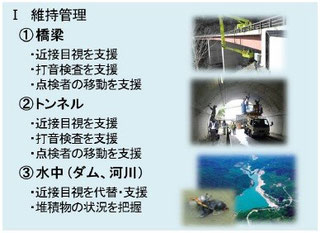
次世代社会インフラ用ロボット開発・導入重点分野(5つの重点分野)
(1)維持管理分野
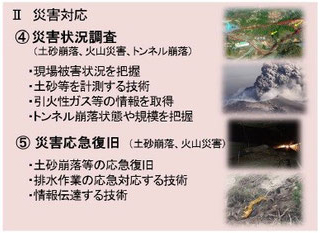
(2)災害分野
実施フロー
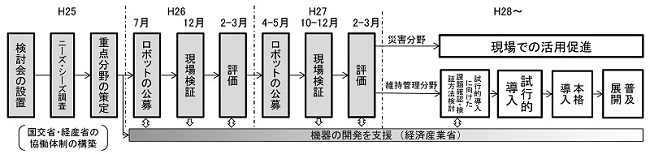
これを受け、国土交通省では、開発・導入を促進するロボットの現場検証及び評価を行うことを目的に「次世代社会インフラ用ロボット現場検証委員会」を平成26年2月に設置し、平成26年4月2日に第1回の検討会を開催致しました。
また、現場検証委員会においては、維持管理分野として「橋梁維持管理部会」、「トンネル維持管理部会」、「水中維持管理部会」の3部会、災害分野として「災害調査部会」、「応急復旧部会」の2部会、合計5つの部会を設置いたしました。
~委員会の取組~
次世代社会インフラ用ロボット現場検証委員会では、H26, H27年度、重点分野にかかる様々な技術を検証・評価し、実用性を高めるための技術改良を促進して参りました(H26年度:67技術、H27年度:70技術)。
災害分野については、H28年度より現場での導入が可能となりました。
また、H28, H29年度、維持管理分野については、H27年度に検証・評価を受けた一部の技術に対して、ロボットによる点検支援の位置付け(ユースケース)を想定し、実用化に向けて達成すべき要求性能(案)を設定し、技術の評価検証を実施いたしました(H28, 29年度:16技術)。
【参考】各分野、年度別の現場検証結果等について (年度をクリックすると詳細をご覧いただけます)
<維持管理分野>
○橋梁維持管理部会
H26年度からH29年度の評価検証を経て、現在、橋梁維持管理におけるロボット技術は現場での導入が可能となっております。
+平成26年度
<公募の概要>
1 公募技術:橋梁の桁や床版における損傷について、点検要領に基づく近接目視や打音検査の支援を行う技術やシステムを公募
2 公募期間:平成26年4月9日(水)~平成26年5月28日(水)
3 応募数:31技術
<検証の概要>
4 検証技術数:17技術
5 検証項目:点検の代替または支援、および「橋梁点検要領等」の規定に定める点検調書の作成または支援に対する点検精度、安全性および効率性について検証
6 検証結果:今回の現場検証では、ロボットによる点検調書の従来技術相当の精度には至りませんでした。一方、実現場でなければ見えてこない様々な課題が明確になり、開発者が取り組むべき今後の開発課題、開発目標が具体的に提示されました。
+平成27年度
1 公募技術:橋梁の桁や床版、支承部等における損傷について、点検要領に基づく近接目視や打音検査の支援を行う技術やシステムを公募(H26年度より対象部材を拡大)
2 公募期間:平成 27 年 5 月 28 日(木)~平成 27 年 6 月 18 日(木)
3 応募数:26技術
<検証の概要>
4 検証技術数:21技術
5 検証項目:点検の代替または支援、および「橋梁点検要領等」の規定に定める点検調書の作成または支援に対する点検精度、安全性および効率性について検証
6 検証結果:今回の現場検証では、多種多様な形態のロボット技術の開発・改良が進んでおり、それらのロボット技術が、一連の点検作業における『行く』、『見る・撮る』、『検出する』、『記録する』の各過程について、いくつかの「支援」の可能性を有することを確認され、また、更なる活用に向けた課題も明らかになりました。
+平成28, 29年度
1 検証概要: H27年度に検証・評価を受けた一部の技術に対して、ユースケースと要求性能を示し、技術の評価検証を実施。なお、H28年度は、具体的な実用性の高いコンクリート構造物の非破壊検査技術を取り上げて、現場での検証項目や検証方法を検討。
2 検証技術数:10技術
3 ユースケース:(A-1)損傷写真の記録 (A-2)損傷写真の整理 (A-3)損傷図の作成支援 (A-4)損傷程度の評価区分の自動判別
4 検証項目:ユースケースそれぞれに対して、精度検証や作業時間の短縮に伴う経済性等の検証を実施
5 検証結果:検証の結果、環境条件や現場状況等によっては所定の性能を発揮することが困難であることが判明した一方、各点検ロボットとも適切なシステムや撮影機器を有していることが明らかになりました。また、損傷の種類や程度を自動的に判別させる技術については、実装が可能なレベルに至っていないということも判明しました。
○トンネル維持管理部会
H26年度からH29年度の評価検証を経て、現在、トンネル維持管理におけるロボット技術は現場での導入が可能となっております。
+平成26年度
<公募の概要>
1 公募技術:トンネルの覆工や坑門等に発生した変状に対して、点検要領に基づく近接目視や打音検査の支援を行う技術やシステムを公募
2 公募期間:平成26年4月9日(水)~平成26年5月28日(水)
3 応募数:10技術
<検証の概要>
4 検証技術数:8技術
5 検証項目:点検の代替または支援に対する点検精度、安全性について検証
6 検証結果:今回の現場検証の結果からは、現行手法による点検作業の代替または全面的な支援となる技術は確認できなかったが、現存する各技術の現状確認、ならびに今後の開発の方向性を示すことができました。
+平成27年度
<公募の概要>
1 公募技術:トンネルの覆工や坑門等に発生した変状に対して、点検要領に基づく近接目視や打音検査の支援を行う技術やシステムを公募
2 公募期間:平成 27 年 5 月 28 日(木)~平成 27 年 6 月 18 日(木)
3 応募数:13技術
<検証の概要>
4 検証技術数:13技術
5 検証項目:点検、点検調書作成の効率性や通行規制時間の短縮時間、変状の検出精度について検証
6 検証結果:検証したロボット技術は人による変状抽出・評価・判断のプロセスが必要になり、そのため、その計測結果の精度は、変状抽出等を担当する人の力量によって左右される点が課題として挙げられます。現時点では、ロボットによる点検作業の完全な代替は困難といえますが、昨年度の検証結果を踏まえた技術改良が加えられ、計測精度や効率性が改善されており、今後のさらなる開発・改良が進むことで、人間の代替あるいはそれに近い点検支援が可能となるロボットの開発が期待されます。
+平成28, 29年度
1 検証概要: H27年度に検証・評価を受けた一部の技術に対して、ユースケースと要求性能を示し、技術の評価検証を実施いたしました。
2 検証技術数:6技術
3 ユースケース:(A-1)損傷写真の記録 (A-2)損傷写真の整理 (A-3)損傷図の作成支援 (A-4)損傷程度の評価区分の自動判別
4 検証項目:ユースケースそれぞれに対して、精度検証や作業時間の短縮に伴う経済性等の検証を実施
5 検証結果:検証の結果、環境条件や現場状況等によっては所定の性能を発揮することが困難であることが判明した一方、各点検ロボットとも適切なシステムや撮影機器を有していることが明らかになりました。また、損傷の種類や程度を自動的に判別させる技術については、実装が可能なレベルに至っていないということも判明しました。
○水中維持管理部会
H26年度、H27年度の評価検証を経て、現在、水中維持管理におけるロボット技術は現場での導入が可能となっております。
+平成26年度
<公募の概要>
1 公募技術:ダムゲート設備や堤体等の損傷・変状、河床洗堀等の状態について、近接目視等の代替または支援ができる技術やシステムを公募
2 公募期間:平成26年4月9日(水)~平成26年5月28日(水)
3 応募数:16技術
<検証の概要>
4 検証技術数:14技術
5 検証項目:点検対象箇所まで潜行し、画像等を取得することで、潜行能力や操作性、取得データの品質等を確認する。
6 検証結果:今回の現場検証においては、水中点検の課題であった水深100m程度の深い箇所においても、水中ロボットの活用によって、潜水士の危険作業を回避できること、また、潜水士の人材不足の解消にも寄与できる可能性があることなどが示されました。
+平成27年度
<公募の概要>
1 公募技術:ダムゲート設備や堤体等の損傷・変状、河床洗堀等の状態について、近接目視等の代替または支援ができる技術やシステムを公募
2 公募期間:平成 27 年 5 月 28 日(木)~平成 27 年 6 月 18 日(木)
3 応募数:13技術
<検証の概要>
4 検証技術数:13技術
5 検証項目:高濁度下、40m 以深での潜水作業における安全性の向上と費用削減について検証を実施(概査)。また、概査にて変状が認められた特定箇所にて潜水士と同等の精度の調査を行い、潜水士による近接目視の代替について検証を実施(精査)。
6 検証結果:今回の現場検証においては、光学カメラや音響センサー等を搭載したROVについて、技術の有効性が確認され、これらの技術は現場適用性が高いことが判明しました。
<災害分野>
○災害調査部会
H26年度、H27年度の評価検証を経て、現在、災害調査におけるロボット技術は現場での導入が可能となっております。
+平成26年度
<公募の概要>
1 公募技術:土砂災害、火山災害またはトンネル災害において、現地の状況を把握するための高精細な画像・映像や地形データ等を取得する技術やシステムを公募
2 公募期間:平成26年4月9日(水)~平成26年5月28日(水)
3 応募数:24技術
<検証の概要>
4 検証技術数:21技術
5 検証項目:事前に設定した災害時のシナリオに基づき調査箇所まで移動し、画像等のデータを取得することで、現場への適用性や操作性、取得データの品質等を確認する。
6 検証結果:今回の現場検証においては、特に土砂災害・火山災害の分野で多くの応募があったマルチコプターについて、従来の有人による飛行体を用いた技術では不可能である被災箇所への接近撮影や計測を行うことが可能で、その成果は災害調査に十分役立つレベルであることが確認できました。一方で、特に条件の厳しい条件においては、適応現場や成果の精度等が運用技術に大きく左右されることが判明しました。
+平成27年度
<公募の概要>
1 公募技術:土砂災害、火山災害またはトンネル災害において、現地の状況を把握するための高精細な画像・映像や地形データ等を取得する技術やシステムを公募
2 公募期間:平成 27 年 5 月 28 日(木)~平成 27 年 6 月 18 日(木)
3 応募数:19技術
<検証の概要>
4 検証技術数:15技術
5 検証項目:事前に設定した災害時のシナリオに基づき調査箇所まで移動し、画像等のデータを取得することで、運搬性や現場適用性、迅速性、取得データの品質、移動性、経済性、安全性等を確認する。
6 検証結果:今年度の現場検証においては、土砂崩落災害、火山災害、トンネル災害のいずれにおいても、昨年度より技術レベルの向上が見られ、実際の災害時において活用を推薦できる技術が複数ありました。
○応急復旧部会
H26年度、H27年度の評価検証を経て、現在、応急復旧におけるロボット技術は現場での導入が可能となっております。
+平成26年度
<公募の概要>
1 公募技術:土砂崩落または火山災害、土砂崩落による河道閉塞等において、災害現場の応急復旧が可能な技術・システムを公募
2 公募期間:平成26年4月9日(水)~平成26年5月28日(水)
3 応募数:8技術
<検証の概要>
4 検証技術数:7技術
5 検証項目:遠隔操縦機については、実際に掘削作業等を行い、作業効率や走行性、操作性等を検証する。排水作業の応急対応については、人力による配水管設置作業の要否等を検証。
6 検証結果:今回の現場検証では、汎用的な使用には改善が必要な点はあるものの、災害時の早期復旧において効果が期待出来る技術を見いだすことが出来ました。一方で、実現場でなければ見えてこない種々の課題も明らかになりました。
+平成27年度
<公募の概要>
1 公募技術:土砂崩落または火山災害、土砂崩落による河道閉塞等において、災害現場の応急復旧が可能な技術・システムを公募
2 公募期間:平成 27 年 5 月 28 日(木)~平成 27 年 6 月 18 日(木)
3 応募数:8技術
<検証の概要>
4 検証技術数:8技術
5 検証項目:活用場面を「発災後の対応(初動対応、応急又は復興対応)」と「施工方式(目視、映像、排水作業)」という組合せで整理し、場面毎に運搬性、迅速性、現場適用性、施工性、信頼性、安全性、経済性を検証する。
6 検証結果:今年度の現場検証においては、土砂崩落または火山災害において応急復旧等を行ういずれの技術・システムについても、昨年度より技術レベルの向上が見られ、実際の災害時において活用を推薦できる技術が複数ありました。
- (1、3について)国土交通省 大臣官房 参事官(イノベーション)グループ 施工企画室 技術企画係
- 電話 :03-5253-8111(内線22432、22433)
- (2について)国土交通省大臣官房 参事官(イノベーション)グループ 施工企画室 計画係
- 電話 :03-5253-8111(内線22406、22407)
![]()